
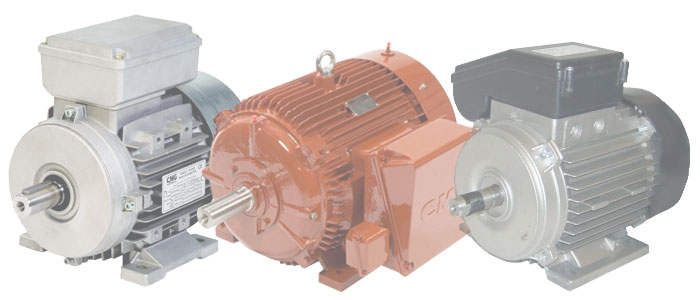
Aufgrund des robusten Aufbaus und der einfachen Steuerung werden Drehstrom-Asynchronmotoren gegenüber vielen anderen Motoren für die Anwendungen mit Wechselstrommotor . Dieser Drehstrommotor ist für größere Lastvorgänge in verschiedenen Anwendungen verantwortlich, z. B. für Güter- und Hebezeuge, Förderer, Kompressoren, Pumpen, Lüftungssysteme, industrielle Lüftersteuerungen usw.

Drehstrommotor
Mit der Erfindung von drehzahlgeregelten Antrieben und mehreren anderen Arten von Motorstartern Drehstrommotoren sind zu günstigen Antrieben für Anwendungen mit variabler Drehzahl geworden. Da diese Motoren beim Fahren mit Last wichtig sind, ist es auch wichtig, ihre Sicherheit und ihren Schutz gegen Einschaltströme, Überlastungen, einphasige Phasen, Überhitzung und andere fehlerhafte Bedingungen zu gewährleisten. Bevor wir uns mit den Details dieser Motoren und ihrer Schutzsysteme befassen, wollen wir uns die Grundlagen der dreiphasigen Motoren ansehen.
Dreiphasen-Wechselstrommotoren
Es gibt hauptsächlich zwei Arten von Dreiphasen- oder Mehrphasenmotoren: Induktions- oder Asynchronmotoren und Synchronmotoren. Synchronmotoren sind spezielle Motortypen, die in Anwendungen mit konstanter Drehzahl verwendet werden, während die meisten Motoren, die in industriellen Anwendungen verwendet werden, vom Induktionstyp sind. Dieser Artikel konzentriert sich nur auf eine dreiphasige Induktionsmotor und sein Schutz .

Aufbau des Induktionsmotors
Diese Motoren sind Induktionsmotoren vom Typ Eichhörnchen und Schleifring. Dreiphaseninduktion Motor besteht aus einem Stator und einem Rotor und es gibt keine elektrische Verbindung zwischen diesen beiden. Dieser Stator und diese Rotoren bestehen aus hochmagnetischen Kernmaterialien mit weniger Hysterese und Wirbelstromverlusten. Der Stator besteht aus dreiphasigen Wicklungen, die sich bei einer Phasenverschiebung von 120 Grad überlappen. Diese Wicklungen werden durch dreiphasige Hauptversorgung angeregt.
Dieser dreiphasige Wechselstrommotorrotor unterscheidet sich für die Schleifring- und Käfigläufermotoren. Bei einem Käfigläufermotor besteht der Rotor aus schweren Aluminium- oder Kupferstangen, die an beiden Enden des zylindrischen Rotors kurzgeschlossen sind. Bei einem Schleifring-Induktionsmotor besteht der Rotor aus dreiphasigen Wicklungen, die an einem Ende innen mit einem Stern versehen sind, und die anderen Enden werden nach außen gebracht und mit den auf der Rotorwelle montierten Schleifringen verbunden, wie in der Abbildung gezeigt . Mit Hilfe von Kohlebürsten wird ein Rheostat an diese Wicklungen angeschlossen, um ein hohes Anlaufdrehmoment zu entwickeln.
Funktionsprinzip: Immer wenn die dreiphasige Statorwicklung dreiphasig versorgt wird, entsteht darin ein rotierendes Magnetfeld mit 120 Verschiebungen konstanter Größe und synchroner Drehzahl. Dieses sich ändernde Magnetfeld wandert zum Rotorleiter und induziert einen Strom in den Rotorleitern gemäß den Faradays-Gesetzen der elektromagnetischen Induktion. Wenn die Rotorleiter kurzgeschlossen werden, beginnt der Strom durch diese Leiter zu fließen.
Nach dem Lenzschen Gesetz wirken diese induzierten Ströme der Ursache ihrer Erzeugung entgegen, d. H. Dem rotierenden Magnetfeld. Infolgedessen beginnt sich der Rotor in die gleiche Richtung wie das rotierende Magnetfeld zu drehen. Die Rotordrehzahl muss jedoch geringer sein als die Statorgeschwindigkeit - andernfalls werden im Rotor keine Ströme induziert, da die Relativgeschwindigkeit der Magnetfelder des Rotors und des Stators der Grund für die Rotorbewegung ist. Dieser Unterschied zwischen dem Stator- und dem Rotorfeld wird als Schlupf bezeichnet. Aufgrund dieser relativen Drehzahldifferenz zwischen Stator und Rotoren wird dieser Drehstrommotor als Asynchronmaschine bezeichnet.
Für den Induktionsmotor erforderliche Schutzarten
Drehstrom-Induktionsmotoren machen 85 Prozent der installierten Leistung der industriellen Antriebssysteme aus. Daher ist der Schutz dieser Motoren für den zuverlässigen Betrieb von Lasten erforderlich. Motorausfälle werden hauptsächlich in drei Gruppen unterteilt: elektrisch, mechanisch und umweltbedingt. Mechanische Beanspruchungen verursachen eine Überhitzung, die zum Verschleiß der Rotorlager führt, während die übermechanische Belastung zu starken Strömen führt und somit zu steigenden Temperaturen führt. Elektrische Ausfälle werden durch verschiedene Fehler wie Phase-zu-Phase- und Phase-zu-Erde-Fehler, einphasige Phasen, Über- und Unterspannung, Spannungs- und Stromunsymmetrie, Unterfrequenz usw. verursacht.

Starten des Stroms des Induktionsmotors
Zusätzlich zu den Motorschutzsystemen für die oben genannten Fehler ist es auch erforderlich, einen dreiphasigen Motorstarter zu verwenden, um den Sternstrom des Induktionsmotors zu begrenzen. Wie wir wissen, gibt es in jeder elektrischen Maschine, wenn eine Versorgung bereitgestellt wird, einen Widerstand gegen diese Versorgung durch eine induzierte EMF - die als EMF bezeichnet wird. Dies begrenzt die Stromaufnahme durch die Maschine, aber zu Beginn ist die EMF Null, da sie direkt proportional zur Drehzahl des Motors ist. Daher wird der enorme Strom der Null-Gegen-EMK zu Beginn vom Motor aufgenommen, und dies ist das 8-12-fache des Volllaststroms, wie in der Abbildung gezeigt.
Um den Motor vor dem hohen Starstrom zu schützen, stehen verschiedene Staring-Methoden zur Verfügung, wie z. B. reduzierte Spannung, Rotorwiderstand, DOL, Stern-Delta-Starter , Spartransformator, Sanftanlasser usw. Zum Schutz des Motors vor den oben genannten Fehlern sind verschiedene Schutzeinrichtungen wie Relais, Leistungsschalter, Schütze und verschiedene Antriebe implementiert.
Dies sind einige der Schutzsysteme für Drehstrom-Induktionsmotoren gegen Einschaltströme, Überhitzung und einphasige Fehler unter Verwendung eines Mikrocontrollers für Anwendungen auf niedriger Ebene zum besseren Verständnis der Schüler.
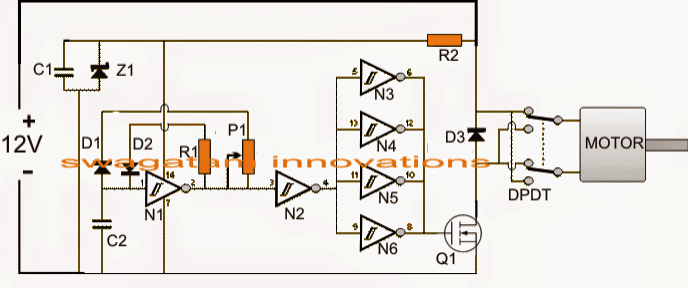
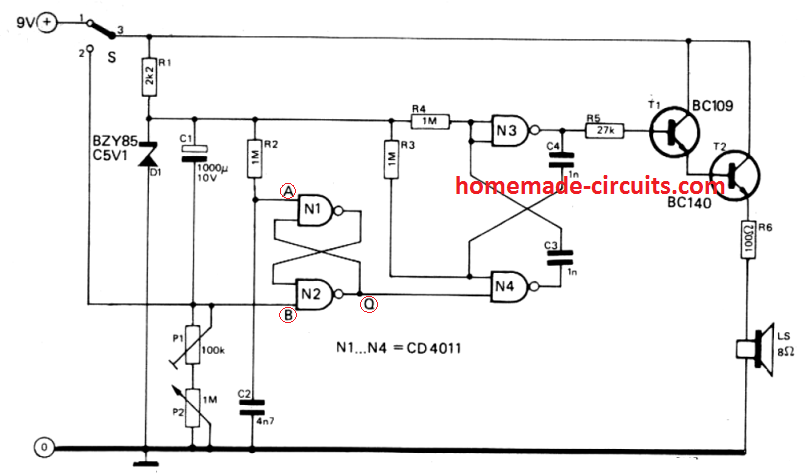
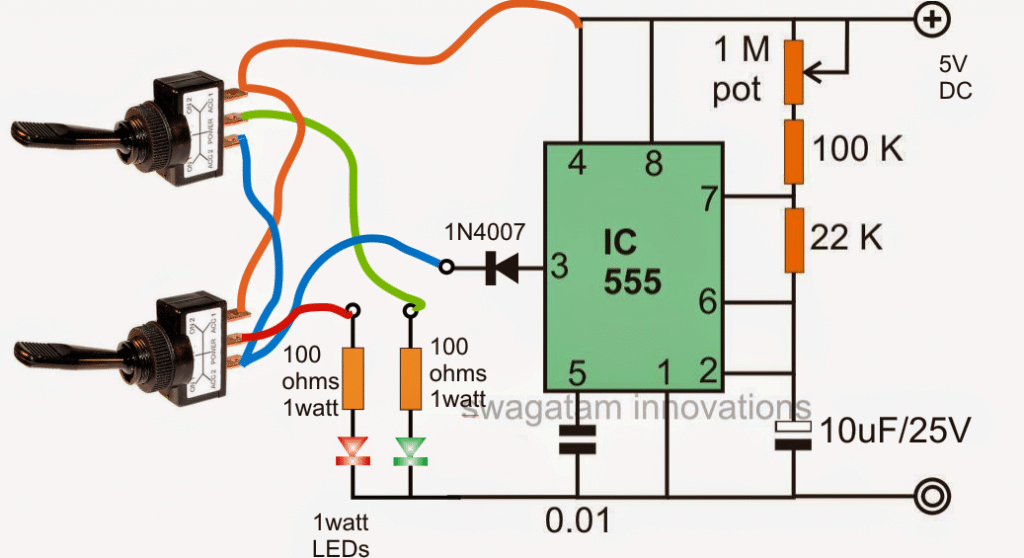
Elektronischer Sanftanlauf für 3-Phasen-Induktionsmotor
Dies Sanftanlauf des Induktionsmotors ist die moderne Startmethode, die die mechanischen und elektrischen Spannungen reduziert, die in den DOL- und Stern-Delta-Startern verursacht werden. Dies begrenzt den Anlaufstrom zum Induktionsmotor unter Verwendung von Thyristoren.
Dieser 3-Phasen-Motorstarter besteht aus zwei Haupteinheiten: einer ist das Aggregat und die andere Steuereinheit. Das Netzteil besteht aus Back-to-Back-SCRs für jede Phase, die von der in der Steuerschaltung implementierten Logik gesteuert werden. Diese Steuereinheit besteht aus einem Niederspannungskreuzkreis mit Kondensatoren zur Erzeugung der Verzögerungszeit.

Elektronischer Sanftanlauf für 3-Phasen-Induktionsmotor
In dem obigen Blockdiagramm korrigiert die Steuerschaltung jede Phasenversorgung, regelt sie und vergleicht die Nulldurchgangsspannung durch den Operationsverstärker, wenn dem System eine dreiphasige Versorgung gegeben wird. Dieser Operationsverstärkerausgang steuert den Transistor an, der für die Erzeugung einer Zeitverzögerung unter Verwendung eines Kondensators verantwortlich ist. Diese Kondensatorentladung ermöglicht für eine bestimmte Zeit einen weiteren Operationsverstärkerausgang, so dass Optokoppler für diese verstrichene Zeit angesteuert werden. Während dieser Zeit löst der Optoisolatorausgang hintereinander liegende Thyristoren aus, und der an den Motor angelegte Ausgang wird während dieser Zeit verringert. Nach dieser Startzeit wird eine volle Spannung an den Induktionsmotor angelegt, und daher läuft der Motor mit voller Drehzahl. Auf diese Weise reduziert eine Nullspannungsauslösung für einen bestimmten Zeitraum beim Starten eines Induktionsmotors absichtlich den Anlauf-Einschaltstrom des Induktionsmotors.
Induktionsmotorschutzsystem
Dieses System schützt den 3-Phasen-Wechselstrommotor von einphasiger und Überhitzung. Wenn eine der Phasen ausfällt, erkennt dieses System sie und schaltet sofort den Motor aus, der vom Stromnetz gespeist wird.

Induktionsmotorschutzsystem
Alle drei Phasen werden gleichgerichtet, gefiltert und geregelt und an einen Operationsverstärker abgegeben, wo diese Versorgungsspannung mit einer bestimmten Spannung verglichen wird. Wenn eine der Phasen übersehen wird, gibt sie am Operationsverstärkereingang eine Spannung von Null und daher gibt sie dem Transistor eine niedrige Logik, wodurch das Relais weiter abgeschaltet wird. Daher wird das Hauptrelais ausgeschaltet und die Stromversorgung des Motors unterbrochen.
In ähnlicher Weise wird, wenn die Temperatur des Motors einen bestimmten Grenzwert überschreitet, die Der Operationsverstärkerausgang wird abgeschaltet das entsprechende Relais auch dann wird auch das Hauptrelais ausgeschaltet. Auf diese Weise können die einzelnen Phasenfehler und Übertemperaturbedingungen im Induktionsmotor überwunden werden.
Hier geht es um dreiphasige Motorschutzsysteme gegen Einschaltströme, einphasige Phasen und Überhitzung. Wir erkennen an, dass die Informationen in diesem Artikel für Sie hilfreich sind, um dieses Konzept besser zu verstehen. Wenn Sie Hilfe bei der Implementierung dieser oder anderer Projekte benötigen, können Sie uns kontaktieren, indem Sie unten einen Kommentar abgeben.
Bildnachweis
- Drehstrommotor von macpd
- Starten des Stroms des Induktionsmotors durch Elektroinstallation







{kind=link}
{kind=link}