In den elektrischen Systemen verwenden wir entweder in der Industrie, Kraftwerke oder häusliche Bedürfnisse, Motoren und Generatoren sind eine gemeinsame Sache geworden. Mit der Nachfrage nach energieeffizienten und weniger stromverbrauchenden Systemen wird die Erfindung neuer Modelle dieser elektrischen Geräte gesehen. Der grundlegende Berechnungsfaktor für den zuverlässigen Betrieb von Motoren und Generatoren ist der Leistungsfaktor . Dies ist das Verhältnis der angelegten Leistung zur erforderlichen Leistung. Normalerweise wird der Gesamtstromverbrauch in den Branchen und Fabriken anhand des Leistungsfaktors berechnet. Daher sollte der Leistungsfaktor immer auf Einheit gehalten werden. Aufgrund des Anstiegs der Blindleistung in diesen Geräten nimmt der Leistungsfaktor jedoch ab. Um den Leistungsfaktor auf eins zu halten, werden viele Methoden eingeführt. Das Synchronmotorkonzept ist eines davon.
Was ist ein Synchronmotor?
Die Definition des Synchronmotors besagt, dass „An AC Motor im stationären Zustand ist die Drehung der Welle synchron mit der Frequenz des angelegten Stroms “. Der Synchronmotor arbeitet als Wechselstrommotor, aber hier ist die Gesamtzahl der von der Welle ausgeführten Umdrehungen gleich dem ganzzahligen Vielfachen der Frequenz des angelegten Stroms.

Synchronmotor
Der Synchronmotor benötigt zum Arbeiten keinen Induktionsstrom. In diesen Motoren sind im Gegensatz zu Induktionsmotoren mehrphasige Wechselstrom-Elektromagnete vorhanden der Staat r , die ein rotierendes Magnetfeld erzeugt. Hier besteht der Rotor aus einem Permanentmagneten, der mit dem rotierenden Magnetfeld synchronisiert wird und sich synchron zur an ihn angelegten Stromfrequenz dreht.
Synchronmotor Design
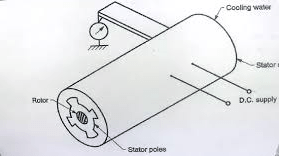
Stator und Rotor sind die Hauptbestandteile des Synchronmotors. Hier hat der Statorrahmen eine Umhüllungsplatte, an der Schlüsselstangen und Umfangsrippen angebracht sind. Fundamente und Rahmenhalterungen dienen zur Unterstützung der Maschine. Zur Anregung von Feldwicklungen mit Gleichstrom werden Schleifringe und Bürsten verwendet.
Zylindrische und runde Rotoren werden für 6-polige Anwendungen verwendet. Auffallende Polrotoren werden verwendet, wenn eine größere Anzahl von Polen erforderlich ist. Der Aufbau des Synchronmotors und des Synchrongenerators ist ähnlich.
Funktionsprinzip des Synchronmotors
Die Arbeitsweise von Synchronmotoren hängt von der Wechselwirkung des Magnetfelds des Stators mit dem Magnetfeld des Rotors ab. Der Stator enthält 3 Phasenwicklungen und wird mit 3 Phasen versorgt. Somit erzeugt die Statorwicklung ein dreiphasig rotierendes Magnetfeld. Der Rotor wird mit Gleichstrom versorgt.
Der Rotor tritt in das rotierende Magnetfeld ein, das von der Statorwicklung erzeugt wird, und dreht sich synchron. Jetzt die Drehzahl des Motors hängt von der Frequenz des zugeführten Stroms ab.
Die Drehzahl des Synchronmotors wird durch die Frequenz des angelegten Stroms gesteuert. Die Drehzahl eines Synchronmotors kann berechnet werden als
Ns = 60f / P = 120f / p
wobei f = Frequenz des Wechselstroms (Hz)
p = Gesamtzahl der Pole pro Phase
P = Gesamtpaarpaarzahl der Pole pro Phase.
Wenn eine Last angelegt wird, die größer als die Durchschlaglast ist, wird der Motor desynchronisiert. Die 3-Phasen-Statorwicklung bietet den Vorteil, die Drehrichtung zu bestimmen. Bei einphasiger Wicklung ist es nicht möglich, die Drehrichtung abzuleiten, und der Motor kann in beide Richtungen starten. Um die Drehrichtung in diesen Synchronmotoren zu steuern, sind Startanordnungen erforderlich.
Startmethoden des Synchronmotors
Das Trägheitsmoment des Rotors verhindert, dass sich die großen Synchronmotoren selbst starten. Aufgrund dieser Trägheit des Rotors ist es nicht möglich, dass ein Rotor in dem Moment, in dem die Leistung angelegt wird, mit dem Magnetfeld des Stators synchronisiert wird. Daher ist ein zusätzlicher Mechanismus erforderlich, damit der Rotor synchronisiert werden kann.
Die Induktionswicklung ist in den großen Motoren enthalten, die ein ausreichendes Drehmoment erzeugen, das für die Beschleunigung erforderlich ist. Bei sehr großen Motoren wird zum Beschleunigen der unbelasteten Maschine ein Pony-Motor verwendet. Bei Änderung der Statorstromfrequenz können elektronisch betriebene Motoren bereits ab der Drehzahl Null beschleunigen.
Wenn bei sehr kleinen Motoren das Trägheitsmoment des Rotors und die mechanische Belastung wünschenswert gering sind, können sie ohne Startverfahren starten.
Arten von Synchronmotoren
Abhängig von der Magnetisierungsmethode des Rotors gibt es zwei Arten von Synchronmotoren -
- Nicht aufgeregt.
- Gleichstrom erregt.
Nicht erregter Motor
Bei diesen Motoren wird der Rotor durch das externe Statorfeld magnetisiert. Der Rotor enthält ein konstantes Magnetfeld. Zur Herstellung des Rotors wird hochretentiver Stahl wie Kobaltstahl verwendet. Diese werden als Permanentmagnet-, Reluktanz- und Hysteresemotoren klassifiziert.
- Bei Permanentmagnet-Synchronmotoren wird ein Permanentmagnet zusammen mit Stahl für die Rotorkonstruktion verwendet. Sie haben ein konstantes Magnetfeld im Rotor, so dass die Induktionswicklung nicht zum Starten verwendet werden kann. Wird als getriebelose Aufzugsmotoren verwendet.

- Beim Reluktanzmotor besteht der Rotor aus Stahlguss mit vorspringenden gezackten Polen. Um die Drehmomentwelligkeiten zu minimieren, sind die Rotorpole kleiner als die Statorpole. Enthält eine Käfigwicklung, um dem Rotor ein Anlaufdrehmoment zu verleihen. Wird in Instrumentierungsanwendungen verwendet.
- Hysteresemotoren sind selbststartende Motoren. Hier ist der Rotor ein glatter Zylinder aus magnetisch hartem Kobaltstahl mit hoher Koerzitivkraft. Diese Motoren sind teuer und werden dort eingesetzt, wo eine präzise konstante Drehzahl erforderlich ist. Im Allgemeinen als Servomotoren verwendet.
Gleichstrom angeregter Motor
Hier wird der Rotor mit dem Gleichstrom erregt, der direkt durch Schleifringe geliefert wird. Wechselstrominduktion und Gleichrichter werden ebenfalls verwendet. Diese sind normalerweise groß und größer als 1 PS usw.

Anwendungen von Synchronmotoren
meistens, Synchronmotoren werden für Anwendungen verwendet, bei denen eine präzise und konstante Geschwindigkeit erforderlich ist. Zu den Anwendungen dieser Motoren mit geringer Leistung gehören Positioniermaschinen. Diese werden auch im Roboter angewendet Aktuatoren . Kugelmühlen, Uhren und Plattenspieler-Plattenspieler verwenden ebenfalls Synchronmotoren. Daneben werden diese Motoren auch als Servomotoren und Zeitmessmaschinen eingesetzt.
Diese Motoren sind in einem Bruchteil des Hufeisengrößenbereichs bis zum industriellen Hochleistungsgrößenbereich erhältlich. Diese Motoren werden in industriellen Hochleistungsgrößen eingesetzt und erfüllen zwei wichtige Funktionen. Eines ist ein effizientes Mittel zur Umwandlung von Wechselstrom in mechanische Energie und das andere ist Leistungsfaktorkorrektur . Auf welche Anwendung des Servomotors sind Sie gestoßen?