In der Zeit der 18thJahrhundert selbst gab es die Entwicklung der Gleichstrommotoren. Die Entwicklung von Gleichstrommotoren hat sich stark verbessert und wird in zahlreichen Branchen eingesetzt. In der frühen Periode des 19. Jahrhunderts und mit den Verbesserungen im Jahr 1832 wurden Gleichstrommotoren ursprünglich vom britischen Forscher Sturgeon entwickelt. Er erfand den ersten Kommutatortyp eines Gleichstrommotors, der auch Maschinen simulieren kann. Man könnte sich jedoch fragen, was die Funktionalität des Gleichstrommotors ist und warum es wichtig ist, über die Drehzahlregelung des Gleichstrommotors Bescheid zu wissen. In diesem Artikel werden die Funktionsweise und die verschiedenen Techniken zur Geschwindigkeitsregelung klar erläutert.
Was ist ein Gleichstrommotor?
Ein Gleichstrommotor wird mit Gleichstrom betrieben, der die empfangene elektrische Energie in mechanische Energie umwandelt. Dies löst eine Rotationsänderung im Gerät selbst aus und liefert somit Strom für den Betrieb verschiedener Anwendungen in mehreren Domänen.
Die Drehzahlregelung des Gleichstrommotors ist eines der nützlichsten Merkmale des Motors. Durch Steuern der Motordrehzahl können Sie die Motordrehzahl entsprechend den Anforderungen variieren und den erforderlichen Betrieb erzielen.
Der Geschwindigkeitsregelungsmechanismus ist in vielen Fällen anwendbar, z. B. zum Steuern der Bewegung von Roboterfahrzeugen, der Bewegung von Motoren in Papierfabriken und der Bewegung von Motoren in Aufzügen, wo verschiedene Arten von Gleichstrommotoren werden verwendet.
Funktionsprinzip des Gleichstrommotors
Ein einfacher Gleichstrommotor arbeitet nach dem Prinzip, dass, wenn ein stromführender Leiter in a magnetisch treu d, es erfährt eine mechanische Kraft. In einem praktischen Gleichstrommotor ist der Anker der stromführende Leiter und das Feld liefert ein Magnetfeld.
Wenn der Leiter (Anker) mit Strom versorgt wird, erzeugt er seinen eigenen Magnetfluss. Der Magnetfluss addiert sich entweder zum Magnetfluss aufgrund der Feldwicklungen in einer Richtung oder hebt den Magnetfluss aufgrund der Feldwicklungen auf. Die Akkumulation des Magnetflusses in einer Richtung im Vergleich zur anderen übt eine Kraft auf den Leiter aus und beginnt daher, sich zu drehen.
Nach dem Faradayschen Gesetz der elektromagnetischen Induktion erzeugt die rotierende Wirkung des Leiters eine EMF . Diese EMF widerspricht nach dem Lenzschen Gesetz tendenziell der Ursache, d. H. Der zugeführten Spannung. Somit hat ein Gleichstrommotor eine ganz besondere Eigenschaft, sein Drehmoment bei variierender Last aufgrund der Gegen-EMK einzustellen.
Warum ist die Drehzahlregelung des Gleichstrommotors wichtig?
Die Drehzahlregelung in der Maschine zeigt einen Einfluss auf die Drehzahl des Motors, wobei dieser direkte Einfluss auf die Maschinenfunktionalität und für die Leistung und das Ergebnis der Leistung so wichtig ist. Zum Zeitpunkt des Bohrens hat jede Art von Material ihre eigene Drehzahl und ändert sich auch je nach Bohrergröße.
Im Szenario von Pumpeninstallationen ändert sich die Durchsatzrate, sodass ein Förderband mit der Funktionsgeschwindigkeit des Geräts synchronisiert werden muss. Diese Faktoren hängen entweder direkt oder indirekt von der Drehzahl des Motors ab. Aus diesem Grund sollte man die Drehzahl des Gleichstrommotors berücksichtigen und verschiedene Arten von Drehzahlregelungsmethoden beachten.
Die Drehzahlregelung des Gleichstrommotors erfolgt entweder manuell durch den Arbeiter oder mit einem beliebigen automatischen Steuerungswerkzeug. Dies scheint im Gegensatz zur Geschwindigkeitsbegrenzung zu stehen, bei der eine Geschwindigkeitsregelung erforderlich ist, die der natürlichen Änderung der Geschwindigkeit aufgrund der Änderung der Wellenlast entgegenwirkt.
Das Prinzip der Geschwindigkeitsregelung
Aus der obigen Abbildung ergibt sich die Spannungsgleichung eines einfachen Gleichspannungs Motor ist
V = Eb + IaRa
V ist die zugeführte Spannung, Eb ist die Gegen-EMK, Ia ist der Ankerstrom und Ra ist der Ankerwiderstand.
Das wissen wir schon
Eb = (PøNZ) / 60A.
P - Anzahl der Pole,
Eine Konstante
Z - Anzahl der Leiter
N- die Drehzahl des Motors
Wenn wir den Wert von Eb in die Spannungsgleichung einsetzen, erhalten wir
V = (PøNZ) / 60A) + IaRa
Oder V - IaRa = (PøNZ) / 60A
d.h. N = (PZ / 60A) (V - IaRa) / ø
Die obige Gleichung kann auch geschrieben werden als:
N = K (V - IaRa) / ø, K ist eine Konstante
Dies impliziert drei Dinge:
- Die Drehzahl des Motors ist direkt proportional zur Versorgungsspannung.
- Die Drehzahl des Motors ist umgekehrt proportional zum Ankerspannungsabfall.
- Die Drehzahl des Motors ist aufgrund der Feldbefunde umgekehrt proportional zum Fluss
Somit kann die Drehzahl eines Gleichstrommotors auf drei Arten gesteuert werden:
- Durch Variation der Versorgungsspannung
- Durch Variation des Flusses und durch Variation des Stroms durch die Feldwicklung
- Durch Variieren der Ankerspannung und durch Variieren des Ankerwiderstands
Mehrere Techniken der Drehzahlregelung des Gleichstrommotors
Da es zwei Arten von Gleichstrommotoren gibt, werden wir hier die Drehzahlregelungsmethoden sowohl für Gleichstrommotoren als auch für Gleichstrommotoren klar diskutieren Nebenschlussmotoren.
Drehzahlregelung des Gleichstrommotors in Serientypen
Es kann in zwei Typen eingeteilt werden:
- Ankergesteuerte Technik
- Feldgesteuerte Technik
Die ankergesteuerte Technik wird weiter in drei Typen eingeteilt
- Ankergesteuerter Widerstand
- Shunt-Ankersteuerung
- Ankerklemmenspannung
Ankergesteuerter Widerstand
Diese Technik wird am häufigsten eingesetzt, wenn der Regelwiderstand eine Reihenschaltung mit dem der Motorversorgung aufweist. Das folgende Bild erklärt dies.

Ankerwiderstandskontrolle
Der Leistungsverlust, der im Regelwiderstand des Motors der DC-Serie auftritt, kann ignoriert werden, da diese Regeltechnik meist über einen längeren Zeitraum angewendet wird, um die Drehzahl zum Zeitpunkt von Szenarien mit geringer Belastung zu verringern. Es ist eine kostengünstige Technik für anhaltendes Drehmoment und wird hauptsächlich beim Fahren von Kränen, Zügen und anderen Fahrzeugen eingesetzt.
Shunted Armature Control
Hier wird der Rheostat sowohl in Reihe als auch in Rangierverbindung mit dem Anker stehen. Es wird eine Änderung des Spannungspegels geben, der an den Anker angelegt wird, und dies ändert sich durch Ändern der Reihe Rheostat . Während die Änderung des Erregerstroms durch Ändern des Shunt-Rheostaten erfolgt. Diese Technik zur Drehzahlregelung im Gleichstrommotor ist aufgrund erheblicher Leistungsverluste bei Drehzahlregelwiderständen nicht so kostspielig. Die Geschwindigkeit kann bis zu einem gewissen Grad reguliert werden, jedoch nicht über dem normalen Geschwindigkeitsniveau.

Drehzahlregelungsmethode für Gleichstrommotoren mit Nebenschluss
Ankerklemmenspannung
Die Drehzahl eines Gleichstrommotors kann auch durch Stromversorgung des Motors unter Verwendung einer individuell variierten Versorgungsspannung erreicht werden, dieser Ansatz ist jedoch kostspielig und nicht umfassend implementiert.
Die feldgesteuerte Technik wird weiter in zwei Typen eingeteilt:
- Feldumlenker
- Steuerung des abgegriffenen Feldes (Abgrifffeldsteuerung)
Feldumlenkungstechnik
Diese Technik verwendet eine Umlenkung. Die Flussrate, die über das Feld verläuft, kann verringert werden, indem ein Teil des Motorstroms über das Serienfeld geleitet wird. Je geringer der Widerstand des Umleiters ist, desto geringer ist der Feldstrom. Diese Technik wird für mehr als den normalen Drehzahlbereich verwendet und bei elektrischen Antrieben angewendet, bei denen die Drehzahl bei abnehmender Last zunimmt.

Drehzahlregelung für Gleichstrommotoren mit Feldumlenkung
Steuerung des abgegriffenen Feldes
Auch hier wird mit der Verringerung des Flusses die Geschwindigkeit erhöht und dies wird durch Verringern der Feldwicklungswindungen erreicht, von denen aus der Stromfluss stattfindet. Hier wird die Anzahl der Gewindebohrungen in der Feldwicklung herausgenommen und diese Technik wird bei elektrischen Traktionen verwendet.
Drehzahlregelung des DC-Shunt-Motors
Es kann in zwei Typen eingeteilt werden:
- Feldgesteuerte Technik
- Ankergesteuerte Technik
Feldsteuerungsmethode für DC-Shunt-Motor
Bei diesem Verfahren wird der Magnetfluss aufgrund der Feldwicklungen variiert, um die Drehzahl des Motors zu variieren.
Da der Magnetfluss von dem durch die Feldwicklung fließenden Strom abhängt, kann er durch Variieren des Stroms durch die Feldwicklung variiert werden. Dies kann erreicht werden, indem ein variabler Widerstand in Reihe mit dem Feldwicklungswiderstand verwendet wird.
Wenn der variable Widerstand in seiner minimalen Position gehalten wird, fließt zunächst der Nennstrom aufgrund einer Nennversorgungsspannung durch die Feldwicklung, und infolgedessen wird die Drehzahl normal gehalten. Wenn der Widerstand allmählich erhöht wird, nimmt der Strom durch die Feldwicklung ab. Dies verringert wiederum den erzeugten Fluss. Somit steigt die Drehzahl des Motors über seinen Normalwert hinaus.
Ankerwiderstandskontrollmethode für DC-Shunt-Motor
Mit diesem Verfahren kann die Drehzahl des Gleichstrommotors durch Steuern des Ankerwiderstands gesteuert werden, um den Spannungsabfall über dem Anker zu steuern. Dieses Verfahren verwendet auch einen variablen Widerstand in Reihe mit dem Anker.
Wenn der variable Widerstand seinen Minimalwert erreicht, ist der Ankerwiderstand normal und daher fällt die Ankerspannung ab. Wenn der Widerstandswert allmählich erhöht wird, nimmt die Spannung am Anker ab. Dies führt wiederum zu einer Verringerung der Motordrehzahl.
Diese Methode erreicht die Drehzahl des Motors unterhalb seines normalen Bereichs.
Ankerspannungsregelungsmethode für DC-Shunt-Motor (Ward Leonard-Methode)
Die Ward Leonard Technik von DC-Motordrehzahlregelkreis wird wie folgt gezeigt:
In dem obigen Bild ist M der Hauptmotor, dessen Drehzahl geregelt werden soll, und G entspricht einem individuell angeregten Gleichstromgenerator, bei dem dieser unter Verwendung eines Drehstrommotors angetrieben wird und der entweder ein Synchron- oder ein Induktionsmotor sein kann. Dieses Muster einer Kombination aus Gleichstromgenerator und Wechselstrommotor wird als M-G-Satz bezeichnet.
Die Generatorspannung wird durch Ändern des Feldstroms des Generators variiert. Dieser Spannungspegel wird variiert, wenn er dem Ankerabschnitt des Gleichstrommotors und dann M zugeführt wird. Um den Fluss des Motorfeldes konstant zu halten, muss der Motorfeldstrom konstant gehalten werden. Wenn die Motordrehzahl geregelt wird, muss der Ankerstrom für den Motor dem des Nennpegels entsprechen.
Der gelieferte Feldstrom ist unterschiedlich, so dass der Ankerspannungspegel von „0“ bis zum Nennpegel variiert. Da die Drehzahlregelung dem Nennstrom und dem anhaltenden Feldfluss des Motors und dem Feldfluss bis zum Erreichen der Nenndrehzahl entspricht. Und da die Leistung das Produkt aus Drehzahl und Drehmoment ist und in direktem Verhältnis zur Drehzahl steht. Damit erhöht sich die Geschwindigkeit, wenn die Leistung zunimmt.
Beide oben genannten Verfahren können keine Geschwindigkeitsregelung in dem gewünschten Bereich bereitstellen. Darüber hinaus kann das Flusssteuerungsverfahren die Kommutierung beeinflussen, während das Ankersteuerungsverfahren aufgrund der Verwendung eines Widerstands in Reihe mit dem Anker einen enormen Leistungsverlust mit sich bringt. Daher ist häufig ein anderes Verfahren wünschenswert - dasjenige, das die Versorgungsspannung steuert, um die Motordrehzahl zu steuern.
Folglich werden mit der Ward Leonard-Technik der einstellbare Leistungsantrieb und der konstante Wert des Drehmoments vom Drehzahlniveau minimal bis zum Niveau der Grunddrehzahl erfasst. Die Feldflussregelungstechnik wird hauptsächlich angewendet, wenn das Geschwindigkeitsniveau größer als das der Grundgeschwindigkeit ist.
Hier wird in der Funktionalität der Ankerstrom auf einem konstanten Niveau bei dem angegebenen Wert gehalten und der Spannungswert des Generators wird konstant gehalten. Bei einem solchen Verfahren erhält die Feldwicklung eine feste Spannung und der Anker eine variable Spannung.
Eine solche Technik des Spannungssteuerungsverfahrens beinhaltet die Verwendung eines Schaltmechanismus, um dem Anker eine variable Spannung bereitzustellen, und die andere verwendet einen Wechselstrommotorgenerator, um dem Anker eine variable Spannung bereitzustellen (der Ward-Leonard-System ).
Das Vor- und Nachteile der Gemeinde Leonard Metho Wagen:
Die Verwendung der Ward Leonard-Technik zur Drehzahlregelung des Gleichstrommotors bietet folgende Vorteile:
- In beiden Richtungen kann die Geschwindigkeit des Geräts über einen größeren Bereich gleichmäßig gesteuert werden
- Diese Technik hat eine intrinsische Bremsfähigkeit
- Die nachlaufenden Blindspannungsampere werden durch einen Antrieb ausgeglichen, und der stark erregte Synchronmotor fungiert als Antrieb, so dass sich der Leistungsfaktor erhöht
- Bei blinkender Last ist der Antriebsmotor der Induktionsmotor mit einem Schwungrad, mit dem die Blinklast auf ein Minimum reduziert wird
Die Nachteile der Ward Leonard-Technik sind:
- Da diese Technik einen Satz von Motor und Generator hat, sind die Kosten höher
- Das Gerät ist kompliziert im Design und hat auch ein hohes Gewicht
- Benötigen Sie mehr Platz für die Installation
- Erfordert regelmäßige Wartung und Fundament ist nicht kostengünstig
- Es wird enorme Verluste geben und somit wird die Effizienz des Systems verringert
- Es wird mehr Lärm erzeugt
Und das Anwendung der Ward Leonard-Methode ist eine reibungslose Drehzahlregelung im Gleichstrommotor. Einige Beispiele sind Bergwerke, Papierfabriken, Aufzüge, Walzwerke und Kräne.
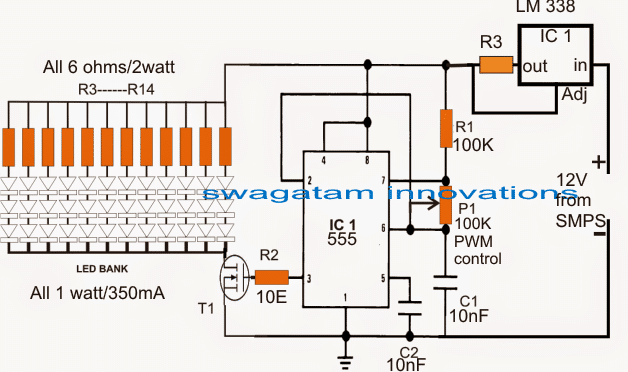
Abgesehen von diesen beiden Techniken ist die am weitesten verbreitete Technik die Drehzahlregelung des Gleichstrommotors mittels PWM Drehzahlregelung eines Gleichstrommotors zu erreichen. PWM beinhaltet das Anlegen von Impulsen unterschiedlicher Breite an den Motortreiber, um die an den Motor angelegte Spannung zu steuern. Diese Methode erweist sich als sehr effizient, da der Leistungsverlust auf ein Minimum beschränkt wird und keine komplexen Geräte verwendet werden müssen.

Spannungsregelungsmethode
Das obige Blockdiagramm zeigt eine einfache Drehzahlregler des Elektromotors . Wie im obigen Blockdiagramm dargestellt, wird ein Mikrocontroller verwendet, um dem Motortreiber PWM-Signale zuzuführen. Der Motortreiber ist ein L293D-IC, der aus H-Brückenschaltungen zum Antreiben des Motors besteht.
PWM wird erreicht, indem die an den Freigabestift des Motortreiber-IC angelegten Impulse variiert werden, um die angelegte Spannung des Motors zu steuern. Die Änderung der Impulse erfolgt durch den Mikrocontroller mit dem Eingangssignal von den Drucktasten. Hier sind zwei Drucktasten vorgesehen, die jeweils das Tastverhältnis von Impulsen verringern und erhöhen.
In diesem Artikel werden daher verschiedene Techniken der Drehzahlregelung des Gleichstrommotors ausführlich erläutert und erläutert, wie wichtig es ist, die Drehzahlregelung zu beobachten. Es wird außerdem empfohlen, darüber Bescheid zu wissen der 12V DC Motordrehzahlregler .