
ZU Roboter ist eine elektromechanische Maschine Dies wird von einer Schaltung oder einem Computerprogramm gesteuert. Roboter haben Menschen ausgetauscht, um kontinuierliche und gefährliche Aufgaben auszuführen, die Menschen nicht ausführen möchten. Vorhanden Roboter werden in verschiedene Kategorien eingeteilt basierend auf ihren Eigenschaften und Leistungen wie Industrieroboter, kommerzielle Roboter, Serviceroboter, mobile Roboter. Hier ist ein Serviceroboter, der die fortlaufenden Aufgaben ausführt, um die Menschen durch eine Handbewegung zu begrüßen, die „Namaste“ durch eine aufgezeichnete Sprachnachricht darstellt. Wenn wir Leute nach Hause, zu Partys, zu Hochzeitsfeiern, ins Büro usw. einladen, müssen wir im Allgemeinen eine Person arrangieren, die sie am Eingang begrüßt und einlädt. Wenn die Anzahl der Personen gering ist, ist die Aufgabe einfacher. Aber wenn Sie Hunderte von Menschen begrüßen, ist die Aufgabe schwierig. Um dieses Problem zu lösen, gibt es hier ein Projekt, nämlich einen Namaste-Roboter mit Sprachsteuerung.

Namaste Roboter
Namaste Roboter mit Sprachsteuerung
Das Hauptkonzept dieser Namaste Roboterprojekt ist die Steuerung der verschiedenen Servomotoren durch ein Arduino Board. Dieser Roboter scannt die umliegenden Personen und dreht seinen Kopf um 180 °. Wenn es jemanden in der Nähe erkennt, wünscht es dieser Person mit Namaste, dass beide Hände zusammen drücken. Es ist die traditionelle Art, Menschen in Indien zu wünschen. Das Anwendungen von Robotern Beteiligen Sie sich an Einkaufszentren, Parks und Büros, um die Menschen anzulocken.
Blockdiagramm des Namastae-Roboters mit Sprachsteuerung
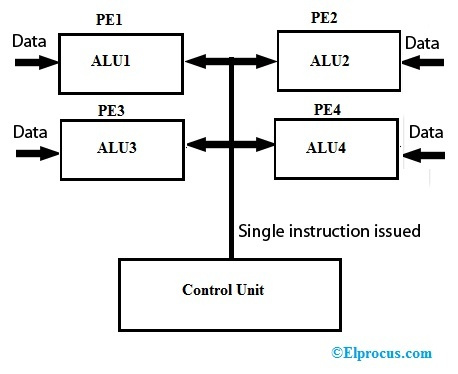
Die folgende Abbildung zeigt das Blockdiagramm des Namaste-Roboters mit Sprachsteuerung. Bei dieser Art von Roboter werden Sprachbefehle programmiert. Die gesamte Entwicklungsplatine kann an die gemeinsame Stromversorgung angeschlossen werden. Die Beschreibung jedes einzelnen Blocks lautet wie folgt. Das Netzteil versorgt alle Module mit Strom. Diese Module benötigen Strom in mA und die Betriebsspannung beträgt 5V.

Blockdiagramm des Namastae-Roboters mit Sprachsteuerung
Arduino Board
Arduino ist eine Art Werkzeug basierend auf einer einfachen Mikrocontroller-Karte, die zur Steuerung und Erfassung der physischen Welt verwendet wird, als ein Desktop-Computer. Für das physische Rechnen stehen verschiedene Mikrocontroller-Plattformen zur Verfügung. Die wichtigsten Funktionen eines Arduino sind kostengünstige Open Source- und erweiterbare Software. Die Arduino-Software ist als Open Source-Tool verfügbar und die Sprache kann durch C ++ - Bibliotheken erweitert werden.

Arduino Board
Ping-Sensor
Der Ping-Sensor verwendet SONAR, um die Entfernung eines Objekts in seiner Nähe zu steuern. Dies Sensor wird verwendet als die Augen des Roboters, um das Hindernis zu erkennen. Zum Beispiel Näherungssensor. Es bietet eine hervorragende Entfernungsgenauigkeit und stabile Messwerte. Der Betrieb dieses Sensors wird durch schwarzes Material oder Sonnenlicht nicht beeinträchtigt. Die Spezifikationen des Ping-Sensors lauten: Spannung beträgt 5 V, Strom beträgt 15 mA, Sensorwinkel ist NICHT> = 15 und Erfassungsabstand beträgt 2 cm ~ 450 cm.

Ping-Sensor
Die Schnittstelle des Ping-Sensors mit einem Arduino ist unten dargestellt. Es stehen vier Pins zur Verfügung, um den Ping-Sensor mit einer Arduino-Karte zu verbinden. Die vier Pins auf der Arduino-Platine sind GND, VCC, ECHO und TRIGGER. Die Pins auf der Platine sind D0-D13, da 12 und 13 Pins Eingangs- und Ausgangspins sind.
Der Arduino-Mikrocontroller bietet uns eine Servosteuerungsbibliothek, mit der wir problemlos Servos wechseln können. In diesem Projekt haben wir 5 Servos verwendet, um die Bewegungen des Namaste-Roboters wie Kopf, rechter Ellbogen, linker Ellbogen, rechte Schulter und linke Schulter zu regulieren. Hier bedeuten die digitalen Eingangs- / Ausgangspins (D5, D6, D9, D10, D1) auf der Arduino-Platine, die mit Servomotoren verbunden ist.
Sprachwiedergabe-IC
Dieser Sprachwiedergabe-IC bietet die aufgezeichnete Nachricht, die mit der vordefinierten Frequenzrate abgespielt wird. Die Wiedergabe wird auf die Audioverstärkungseinheit verschoben.

Sprachwiedergabe-IC
Relais
ZU Relais ist eine Art von Schalter arbeitet elektrisch. Der Stromfluss durch die Spule des Relais erzeugt ein Magnetfeld, das einen Hebel einlädt und die Schaltkontakte ändert.

Relais
Sprachsteuerung Namastae Robot Working
Die Arbeit des Namaste-Roboters kann zusammen mit den simulierten Ergebnissen schrittweise durchgeführt werden. Wenn sich der Namaste-Roboter in einem ersten Zustand befindet, dann der Servomotor s des Roboters 2, 3, 4, 5 befinden sich im AUS-Zustand oder im Null-Zustand. Der Kopf des Namaste-Roboters wechselt aufgrund des Durchdrehens des Servomotors1 von 0 ° -180 ° von Mitte nach rechts, links und dann von hinten nach Mitte. Die Bewegung des Roboterkopfes zeigt an, dass der Namaste-Roboter nach einem Hindernis sucht. Wenn der Ping-Sensor ein Hindernis erkennt, kehrt die Kopfposition des Roboters in einem Winkel von 90 ° zur Mitte zurück und die Relikte des Servomotors1 werden ausgeschaltet. Es wird in einem NIEDRIGEN Zustand aktiviert.
Wenn der Servomotor1 ausgeschaltet wird, werden die verbleibenden Motoren wie Servo4 und Servo5 eingeschaltet. Die Signalleitung wird für die rechte und linke Schulter des Namaste-Roboters ausgelöst. Jetzt können sich die Hände eines Roboters bewegen. Die Schulter-Servomotoren sind mit den digitalen Eingangs- und Ausgangspins der Arduino-Platine verbunden. Die Signalleitungen oder diese Pins sind jedoch hoch und die Position des Servos wird auf 90 ° geändert. Jetzt schalten sich Servo4 und Servo 5 aus.
Schließlich können wir daraus schließen, dass das Hauptziel dieser Sprachsteuerung ist Roboter soll den Service erbringen Menschen höflich willkommen zu heißen, indem man Menschen entdeckt, die davor gehen. Es kann an verschiedenen öffentlichen Orten wie Parks, Einkaufszentren, Partys usw. verwendet werden. Wir hoffen, dass Sie dieses Konzept besser verstehen. Darüber hinaus basieren alle Fragen zu diesem Konzept oder Arduino Roboterprojekte Bitte geben Sie Ihre wertvollen Vorschläge, indem Sie im Kommentarbereich unten einen Kommentar abgeben.
Bildnachweis:
- Arduino Board nyacknewsandviews
- Ping-Sensor Parallaxe
- Sprachwiedergabe-IC Kealab
- Relais awdirect
- Namaste Roboter canstockphoto





{kind=link}
{kind=link}
{kind=link}
{kind=link}