
Roboter sind automatische elektromechanische Geräte, die Menschen oder Tieren ähneln und von einer elektronischen Schaltung oder einem Computerprogramm gesteuert werden. Es gibt verschiedene Arten von Robotern, für die verwendet wird verschiedene Arten von Anwendungen . Jüngste Trends in der Robotertechnologie haben die Entwicklung fortschrittlicher Roboter wie chirurgischer Roboter entwickelt, die Fernmanipulatoren sind, die für Operationen (insbesondere Schlüssellochoperationen) verwendet werden, Laufroboter, die meist mehrbeinig sind und sich durch Gehen bewegen können, Mikrobots und Nanobots sind mikroskopisch und diese Nano-Roboter oder Nano-Geräte, die im menschlichen Körper zur Heilung von Krankheiten eingesetzt werden. Die Rover sind Roboter mit Rädern, mit denen sie zur Erforschung des Weltraums auf anderen Planeten laufen können. Typischerweise werden Roboter in Weltraumanwendungen verwendet autonome Roboter , modulare rekonfigurierbare Roboter oder selbstrekonfigurierbare modulare Roboter und so weiter.
Modulare rekonfigurierbare Roboter
Modulare rekonfigurierbare Roboter sind im Allgemeinen autonome kinematische Geräte mit einstellbarer Morphologie. In Robotern mit fester Morphologie können nur die herkömmlichen Aufgaben wie Betätigung, Erfassung und Steuerung ausgeführt werden. Selbstrekonfigurierbare Roboter oder modular rekonfigurierbare Roboter können jedoch ihre eigenen Formen ändern, indem sie die Konnektivität ihrer Teile so neu organisieren, dass neue Umstände angepasst, neue Aufgaben ausgeführt und Schäden behoben werden können.

Modulare rekonfigurierbare Roboter
Diese selbstrekonfigurierbaren Roboter können als Roboter definiert werden, die ihre Form basierend auf dem Pfad ändern können, den sie durchlaufen müssen. Wenn ein Roboter beispielsweise ein schmales Rohr passieren muss, konfiguriert er sich in Form eines Wurms neu. Wenn er ein unebenes Gelände überqueren muss, konfiguriert er seine Form mit spinnenartigen Beinen neu. Wenn es ein flaches Gelände gibt, konfiguriert es sich als kugelähnliche Struktur für schnelle Bewegungen neu.
Diese rekonfigurierbaren Roboter werden wiederum basierend auf dem Design in zwei Typen klassifiziert. B. homogene modulare Robotersysteme bestehen aus mehrere Module mit ähnlichem Design, um eine Struktur zu bilden, die eine erforderliche Aufgabe ausführt. Ein heterogenes modulares Robotersystem besteht aus mehreren Modulen mit unterschiedlichen Designs, von denen jedes bestimmte Funktionen ausführt. Diese werden verwendet, um eine Struktur zu bilden, die eine erforderliche Aufgabe erfüllt.
Rekonfigurierbare Roboter in Weltraumanwendungen
Als Teil der Forschung über die anderen Planeten starten viele Länder häufig mehrere Satelliten oder Weltraummissionen, um die Bedingungen und Eigenschaften der Planeten zu untersuchen. Um Langzeitdaten zu erhalten, werden daher langfristige Weltraummissionen gestartet, und diese langfristigen Weltraummissionen sind typischerweise selbstrekonfigurierbare Systeme.
Diese selbstrekonfigurierbaren Roboter sind in der Lage, unvorhergesehene Situationen zu bewältigen und sich im Schadensfall selbst zu reparieren. Wir wissen, dass Weltraummissionen sehr groß und massenbeschränkt sind. Daher ist es von Vorteil, wenn wir selbstkonfigurierbare Roboter verwenden, die stattdessen mehrere Aufgaben ausführen können mehrere Roboter dass jeder nur eine bestimmte Aufgabe ausführt.

Roboter für Weltraumanwendungen
Bis heute haben Menschen einen anderen Fuß gesetzt als der Planet Erde ist nur der Mond. Während modulare Roboter, die in Weltraumanwendungen eingesetzt werden, auf vielen anderen Planeten gestartet werden. Eine Reihe von Landern, Manipulatoren, Orbitern und Rovers, die zum Mars geschickt werden, sind berühmte Roboter, die in Weltraumanwendungen eingesetzt werden.
Robotermanipulatoren und Rover
Es gibt verschiedene Arten von Aufgaben, die von Gelenkrobotern im Weltraum ausgeführt werden. Der Prozess der Wartung der Geräte oder Ausrüstungen im Weltraum wird als Raummanipulation bezeichnet, die von Gelenkrobotern durchgeführt wird. Polybot eignet sich gut für die Wartung und Inspektion von Raumstationen oder Satelliten. Robotermanipulatoren werden zur Positionierung im Weltraum oder auf anderen Planeten projiziert, um menschliche Manipulationsfähigkeiten zu emulieren. Sie sind im Allgemeinen auf Freiflug-Raumfahrzeugen oder auf der Umlaufbahn anderer Raumfahrzeuge in Raumfahrzeugen, Planetenlandern und Rovers positioniert, um Proben zu sammeln.

Robotermanipulator
Roboter-Rover werden zur Positionierung auf Planeten projiziert, um menschliche Bewegungsfähigkeiten zu emulieren. Sie sind häufig auf den Oberflächen der terrestrischen Planeten positioniert, klein Sonnensysteme Aerobots (Planetenatmosphären), Cydrobots (Eisschichten) und Hydrobots (Flüssigkeitsschichten).
Automatisiertes Design und Optimierung
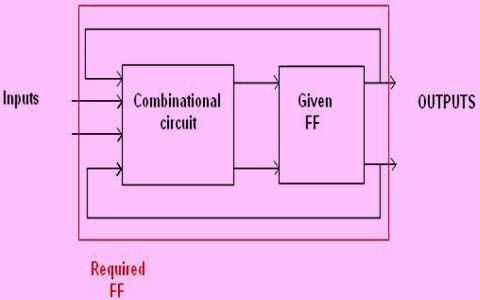
Modulare rekonfigurierbare Roboter oder modulare Robotersysteme werden mit Softwaretools kombiniert, um die Auswahl und den Entwurf der besten Morphologie und Steuerungsstruktur für die Ausführung der jeweiligen Aufgabe zu unterstützen. Obwohl viele Merkmale dieses Entwurfs für die vorhersehbare Zukunft unvermeidlich von der menschlichen Intelligenz abhängen, sind andere Merkmale für das automatisierte Design und die Optimierung geeignet. Alle rekonfigurierbaren Roboter, die in Weltraumanwendungen verwendet werden, müssen so konstruiert sein, dass sie mit Startspannungen, Strahlung im Weltraum, Vakuum, Planetenverteilung und Umgebung des Planeten (Planet, auf dem rekonfigurierbare Roboter verwendet werden, oder auf Zielplaneten) überleben können.
Es gibt zwei Arten von Designs für rekonfigurierbare Roboter: Gitterbasierte Designs und kettenbasierte Designs.

Gitterbasierte Designs eines männlichen rekonfigurierbaren Roboters
Bei gitterbasierten Konstruktionen ist die Rekonfiguration einfach, aber es ist schwierig, Bewegung zu erzeugen, und diese Konstruktion erfordert eine größere Anzahl von Verbindern und Aktuatoren.

Kettenbasierte Designs von rekonfigurierbaren Robotern
Bei kettenbasierten Konstruktionen ist die Rekonfiguration schwierig und weist eine unzureichende Steifheit auf, es ist jedoch leicht, Bewegung zu erzeugen.
Modulare rekonfigurierbare Robotersimulation
Unter Verwendung von C ++ wurde eine auf Physik basierende Software-Simulationsumgebung entwickelt, die es Benutzern ermöglicht, rekonfigurierbare Roboter unter Verwendung verschiedener Modultypen zu konstruieren. Zusätzliche Modultypen werden mit kompatiblen Anschlüssen hinzugefügt, um die Simulation zu erweitern.
Praktisches Beispiel für einen selbstrekonfigurierbaren modularen Roboter

Modulares Transformatormodul
Modularer Transformator ist einer der häufig verwendeten rekonfigurierbaren Roboter. Diese M-TRAN-Module werden verwendet, um eine 3D-Struktur (die ihre eigene Konfiguration ändern kann und auch kleine Roboter erzeugen kann), einen Multi-DOF-Roboter (der flexibel lokalisiert) zu bilden. und metamorphosierender Roboter. Dieser modulare Transformator besteht aus zwei Aktuatoren und einer Batterie.

Internes Diagramm des M-TRAN-Moduls
Internes Blockdiagramm des M-TRAN-Moduls, bestehend aus Li-Ionen-Akku, nichtlinearer Feder, Stromversorgungskreis, Haupt-CPU, Beschleunigungssensor, Permanentmagnet, SMA-Spule, Verbindungsplatte und PIC.
Diese rekonfigurierbaren Roboter werden in Weltraumanwendungen verwendet, um die spezifischen Ziele wie Telekommunikationsbereitstellung, Beobachtung über die Erde zur Datenrückgabe, militärische Durchführbarkeit und Navigationszwecke .
Es gibt viele andere roboterbasierte Projekte und Anwendungen:
- Ultraschall Hindernisgesteuertes Roboterfahrzeug
- Roboter-Fahrzeugbewegung per Handy
- Roboterfahrzeug, das von einer TV-Fernbedienung bedient wird
- Track Sensing Roboter-Fahrzeugbewegung
- Feuerlöschroboter
- Sprachgesteuertes Roboterfahrzeug
- Wählen Sie N Place Robot Von Android drahtlos gesteuert
- Metalldetektor-Roboterfahrzeug
- Auto Metro Train zum Shuttle zwischen Stationen
- HF-gesteuertes Roboterfahrzeug
- Touchscreen-basiertes ferngesteuertes Roboterfahrzeug
Ich hoffe, dieser Artikel enthält kurze Informationen zu modular rekonfigurierbaren Robotern, die in Weltraumanwendungen verwendet werden. Weitere Informationen zu Roboterbasierte Elektronikprojekte Sie können sich an uns wenden, indem Sie Ihre Fragen im Kommentarbereich unten veröffentlichen.
Bildnachweis
- Modulare rekonfigurierbare Roboter von asmedigitalcollection
- Roboter für Weltraumanwendungen von robotnor
- Robotermanipulator von iccrobotics
- Gitterbasierte Designs eines männlichen rekonfigurierbaren Roboters von csail.mit
- Kettenbasierte Designs von rekonfigurierbaren Robotern von Wikimedia
- Modulares Transformatormodul von unit.aist
- Internes Diagramm des M-TRAN-Moduls von Slidesharecdn









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}