Der hier vorgestellte Artikel erklärt eine sehr einfache Drehzahlregelungsschaltung für Wechselstrommotoren mit geschlossenem Regelkreis, die zur Steuerung der Drehzahl einphasiger Wechselstrommotoren verwendet werden kann.
Die Schaltung ist sehr billig und verwendet gewöhnliche elektronische Komponenten für die erforderlichen Implementierungen. Das Hauptmerkmal der Schaltung ist, dass es sich um einen geschlossenen Regelkreis handelt, dh die Drehzahl oder das Drehmoment des Motors kann niemals durch die Last oder die Drehzahl des Motors in dieser Schaltung beeinflusst werden, im Gegenteil, das Drehmoment ist indirekt proportional zu die Größe der Geschwindigkeit.
Schaltungsbetrieb:
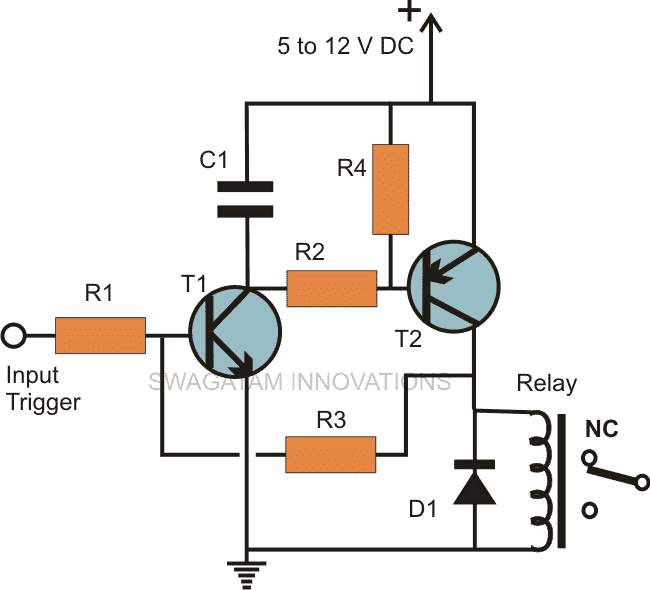
Unter Bezugnahme auf den Schaltplan der vorgeschlagenen einphasigen Wechselstrom-Motorsteuerung können die beteiligten Operationen durch die folgenden Punkte verstanden werden:
Für die positiven Halbzyklen des Eingangs AC wird der Kondensator C2 über den Widerstand R1 und die Diode D1 aufgeladen.

Das Laden von C2 bleibt bestehen, bis die Spannung an diesem Kondensator der simulierenden Zenerspannung der Konfiguration entspricht.
Die um den Transistor T1 verdrahtete Schaltung simuliert effektiv den Betrieb einer Zenerdiode.
Durch die Aufnahme des Topfes P1 kann die Spannung dieser „Zenerdiode“ eingestellt werden. Genau genommen wird die an T1 entwickelte Spannung buchstäblich durch das Verhältnis zwischen den Widerständen R3 und R2 + P1 bestimmt.
Die Spannung am Widerstand R4 wird immer gleich 0,6 Volt gehalten, was der erforderlichen Leitspannung der Basisemitterspannung von T1 entspricht.
Daher bedeutet dies, dass die oben erläuterte Zenerspannung gleich dem Wert sein sollte, der durch Lösen des Ausdrucks erhalten werden kann:
(P1 + R2 + R3 / R3) × 0,6
Teileliste für den oben genannten Drehzahlregler des Wechselstrommotors
- R1 = 39 K,
- R2 = 12K,
- R3 = 22K,
- R4 = 68K,
- P1 = 220 K,
- Alle Dioden = 1N4007,
- C1 = 0,1 / 400 V,
- C2 = 100 uF / 35 V,
- T1 = BC547B,
- SCR = C106
- L1 = 30 Windungen 25 SWG-Draht über einen 3 mm Ferritstab oder 40 uH / 5 Watt
Wie die Last aus einem besonderen Grund positioniert ist
Eine sorgfältige Untersuchung zeigt, dass der Motor oder die Last nicht an der üblichen Position eingeführt wird, sondern unmittelbar nach dem SCR an seiner Kathode verkabelt wird.
Dies führt dazu, dass mit dieser Schaltung ein interessantes Merkmal eingeführt wird.
Die obige spezielle Position des Motors innerhalb der Schaltung macht die Zündzeit des SCR abhängig von der Potentialdifferenz zwischen der Gegen-EMK des Motors und der 'Zenerspannung' der Schaltung.
Das bedeutet einfach, dass der SCR umso schneller zündet, je mehr der Motor geladen ist.
Das Verfahren simuliert eine Funktionsweise mit geschlossenem Regelkreis, bei der die Rückkopplung in Form einer vom Motor selbst erzeugten Gegen-EMK empfangen wird.
Die Schaltung ist jedoch mit einem leichten Nachteil verbunden. Die Einführung eines SCR bedeutet, dass die Schaltung nur eine Phasensteuerung von 180 Grad handhaben kann und der Motor nicht über den gesamten Drehzahlbereich gesteuert werden kann, sondern nur für 50% davon.
Ein weiterer Nachteil, der aufgrund der kostengünstigen Natur der Schaltung verbunden ist, besteht darin, dass der Motor bei niedrigeren Drehzahlen zu Schluckauf neigt. Mit zunehmender Drehzahl verschwindet dieses Problem jedoch vollständig.
Die Funktion von L1 und C1
L1 und C1 sind zur Überprüfung der Hochfrequenz-RFs enthalten, die aufgrund des schnellen Phasen-Choppings durch den SCR erzeugt werden.
Sie müssen weniger sagen, dass das Gerät (SCR) für optimale Ergebnisse auf einem geeigneten Kühlkörper montiert werden muss.
Zurück EMF Drill Speed Controller Circuit
Diese Schaltung wird hauptsächlich zur Steuerung der konstanten Drehzahl kleinerer Reihenwickelmotoren verwendet, wie sie in mehreren elektrischen Handbohrmaschinen usw. zu finden sind. Das Drehmoment und die Drehzahl werden vom Potentiometer P1 gesteuert. Diese Potentiometerkonfiguration gibt an, wie genau der Triac ausgelöst werden könnte.

Wenn die Drehzahl des Motors knapp unter den voreingestellten Wert fällt (bei angeschlossener Last), nimmt die Gegen-EMK des Motors ab. Infolgedessen steigt die Spannung um R1, P1 und C5 an, so dass der Triac früher aktiviert wird und die Motordrehzahl tendenziell zunimmt. Auf diese Weise wird ein gewisser Anteil an Geschwindigkeitsstabilität erreicht.
Zurück: Wie man aus Meerwasser Strom erzeugt - 2 einfache Methoden Weiter: GSM-basierter Schaltkreis für Mobiltelefon-Fernbedienungsschalter