Der Beitrag beschreibt eine einphasige Ansteuerschaltung mit variabler Frequenz oder eine VFD-Schaltung zur Steuerung der Drehzahl des Wechselstrommotors, ohne deren Betriebsspezifikationen zu beeinflussen.
Was ist ein VFD?
Motoren und andere ähnliche induktive Lasten arbeiten nicht gerne mit Frequenzen, die möglicherweise nicht innerhalb ihrer Herstellungsspezifikationen liegen, und neigen dazu, sehr ineffizient zu werden, wenn sie unter solch abnormalen Bedingungen dazu gezwungen werden.
Zum Beispiel kann ein Motor, der für den Betrieb mit 60 Hz spezifiziert ist, nicht empfohlen werden, um mit Frequenzen von 50 Hz oder anderen Bereichen zu arbeiten.
Dies kann zu unerwünschten Ergebnissen führen, wie z. B. einer Erwärmung des Motors, die niedriger oder höher als die erforderlichen Drehzahlen ist, und einem ungewöhnlich hohen Verbrauch, was die Leistung des angeschlossenen Geräts sehr ineffizient macht und die Lebensdauer verringert.
Der Betrieb von Motoren unter verschiedenen Eingangsfrequenzbedingungen wird jedoch häufig zu einem Zwang, und in solchen Situationen kann ein Frequenzumrichter oder eine Ansteuerschaltung mit variabler Frequenz sehr praktisch werden.
Ein VFD ist ein Gerät, mit dem der Benutzer die Drehzahl eines Wechselstrommotors steuern kann, indem er die Frequenz und Spannung der Eingangsversorgung gemäß den Motorspezifikationen einstellt.
Dies bedeutet auch, dass ein Frequenzumrichter es uns ermöglicht, jeden Wechselstrommotor unabhängig von seinen Spannungs- und Frequenzspezifikationen über jede verfügbare Netzwechselstromversorgung zu betreiben, indem die Frequenz und Spannung des Frequenzumrichters entsprechend den Motorspezifikationen angepasst wird.
Dies erfolgt normalerweise mit der angegebenen Steuerung in Form eines variablen Knopfes, der mit einer unterschiedlichen Frequenzkalibrierung skaliert wird.
Die Herstellung eines VFD zu Hause mag schwierig klingen. Ein Blick auf das unten vorgeschlagene Design zeigt jedoch, dass es nicht so schwierig ist, dieses sehr nützliche Gerät (von mir entworfen) zu bauen.
Schaltungsbetrieb
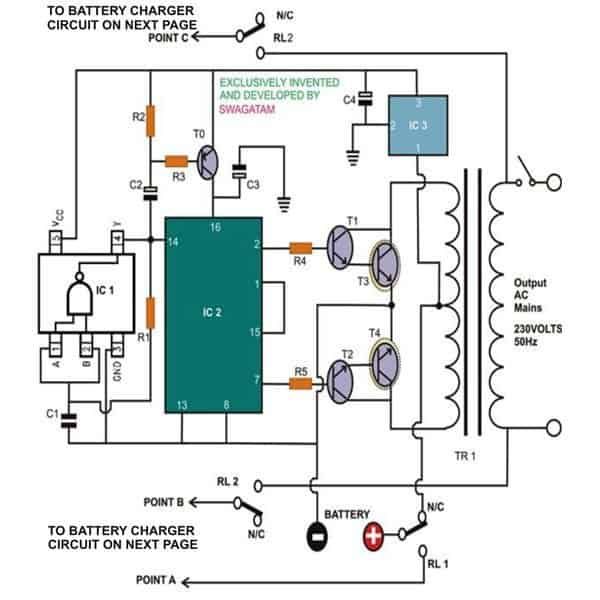
Die Schaltung kann grundsätzlich in zwei Stufen unterteilt werden: die halbbrige Treiberstufe und die PWM-Logikgeneratorstufe.
Die Halbbrückentreiberstufe verwendet den Halbbrückentreiber-IC IR2110, der sich im Alleingang um die Hochspannungsmotorantriebsstufe kümmert, die zwei High-Side- bzw. Low-Side-Mosfets enthält.
Der Treiber-IC bildet somit das Herzstück der Schaltung, benötigt jedoch nur wenige Komponenten, um diese entscheidende Funktion zu implementieren.
Der obige IC würde jedoch eine hohe Logik und eine niedrige Logik in Frequenzen benötigen, um die angeschlossene Last mit der gewünschten spezifischen Frequenz anzutreiben.
Diese Hi- und Lo-Eingangslogiksignale werden zu Betriebsdaten für den Treiber-IC und müssen Signale zur Bestimmung der angegebenen Frequenz sowie PWMs in Phase mit dem Netz-Wechselstrom enthalten.
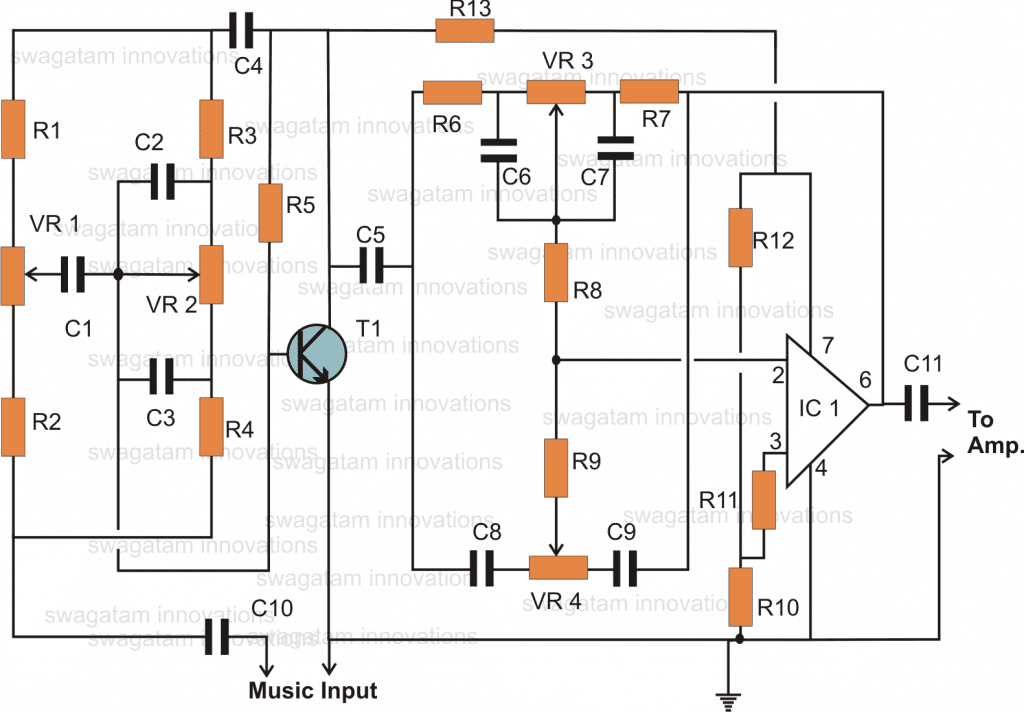
Die obigen Informationen werden von einer anderen Stufe erstellt, die ein paar 555 ICs und einen Dekadenzähler umfasst. IC 4017.
Die zwei 555 ICs sind für die Erzeugung der modifizierten Sinuswellen-PWMs verantwortlich, die der Vollwellen-Wechselstromprobe entsprechen, die von einem abgesenkten Brückengleichrichterausgang abgeleitet ist.
Der IC4017 fungiert als Totempfahl-Ausgangslogikgenerator, dessen Wechselfrequenzrate der Hauptfrequenzbestimmungsparameter der Schaltung wird.
Diese Bestimmungsfrequenz wird von Pin 3 von IC1 gezupft, der auch den IC2-Trigger-Pin herausführt und die modifizierten PWMs an Pin 3 von IC2 erzeugt.
Die modifizierten Sinuswellen-PWMs werden an den Ausgängen des 4017-IC abgetastet, bevor der IR2110 gespeist wird, um den exakten 'Druck' der modifizierten PWMs am Ausgang des Halbbrückentreibers und letztendlich für den Motor, der betrieben wird, zu überlagern.
Cx und die 180k-Topfwerte sollten entsprechend ausgewählt oder angepasst werden, um die richtige Frequenz für den Motor bereitzustellen.
Die Hochspannung am Drain des High-Side-Mosfets muss ebenfalls angemessen berechnet und durch Gleichrichtung der verfügbaren Netzspannung AC abgeleitet werden, nachdem sie gemäß den Motorspezifikationen in geeigneter Weise erhöht oder verringert wurde.
Die obigen Einstellungen bestimmen die korrekten Volt pro Hertz (V / Hz) für den jeweiligen Motor.
Die Versorgungsspannung für beide Stufen kann zu einer gemeinsamen Leitung gemacht werden, die für die Erdungsverbindung gleich ist.
TR1 ist ein abgesenkter 0-12V / 100mA-Transformator, der die Schaltkreise mit den erforderlichen Betriebsversorgungsspannungen versorgt.
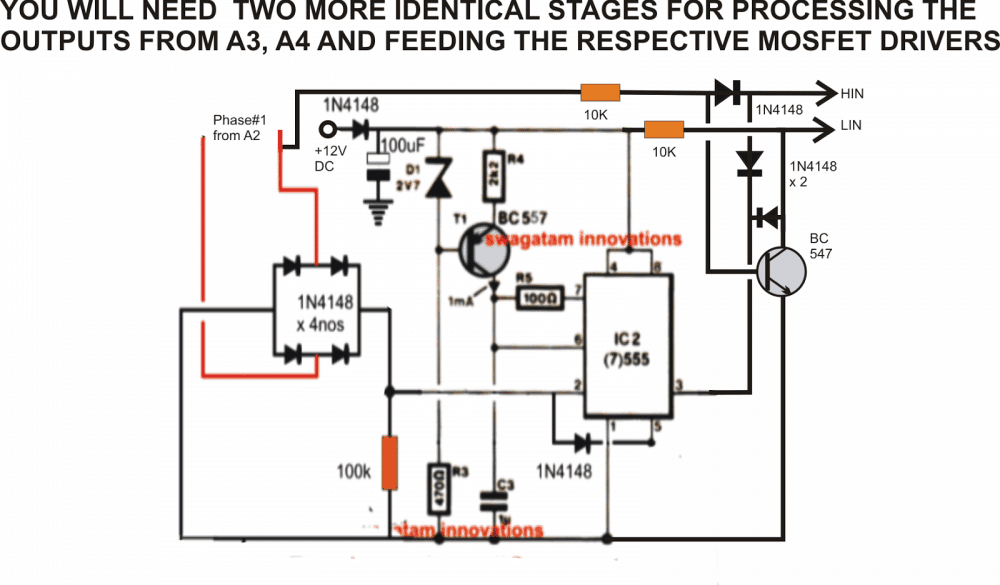
Die PWM-Controller-Schaltung

Sie müssen die Ausgänge des IC 4017 aus dem obigen Diagramm entsprechend in die HIN- und LIN-Eingänge des folgenden Diagramms integrieren. Verbinden Sie außerdem die im obigen Diagramm angegebenen 1N4148-Dioden mit den Low-Side-MOSFET-Gattern, wie im folgenden Diagramm gezeigt.
Der Vollbrücken-Motortreiber

Aktualisieren:

Das oben diskutierte einfache Einzel-VFD-Design kann weiter vereinfacht und verbessert werden, indem ein selbstoszillierender Vollbrücken-IC IRS2453 verwendet wird, wie unten gezeigt:
Hier entfällt der IC 4017 vollständig, da der Vollbrückentreiber mit einer eigenen Oszillatorstufe ausgestattet ist und daher für diesen IC keine externe Triggerung erforderlich ist.
Da es sich um ein Vollbrückendesign handelt, hat die Ausgangssteuerung des Motors einen vollständigen Bereich von Null bis zur maximalen Drehzahleinstellung.
Der Topf an Pin 5 von IC 2 kann zur Steuerung der Drehzahl und des Drehmoments des Motors durch das PWM-Verfahren verwendet werden.
Für die V / Hz-Geschwindigkeitsregelung können die dem IRS2453 zugeordneten Rt / Ct und die dem IC1 zugeordneten R1 (manuell) angepasst werden, um geeignete Ergebnisse zu erhalten.
Noch mehr vereinfachen

Wenn Sie feststellen, dass der Vollbrückenabschnitt überwältigend ist, können Sie ihn wie unten gezeigt durch eine P, N-MOSFET-basierte Vollbrückenschaltung ersetzen. Dieser Treiber mit variabler Frequenz verwendet dasselbe Konzept mit Ausnahme des Vollbrückentreiberabschnitts, der P-Kanal-MOSFETs auf der hohen Seite und N-Kanal-MOSFETs auf der niedrigen Seite verwendet.
Obwohl die Konfiguration aufgrund der Beteiligung von P-Kanal-MOSFETs (aufgrund ihrer hohen RDSon-Bewertung) ineffizient aussehen kann, scheint die Verwendung vieler paralleler P-MOSFETs ein wirksamer Ansatz zur Lösung des Problems mit niedrigem RDSon zu sein.
Hier werden 3 MOSFETs parallel für die P-Kanal-Bauelemente verwendet, um eine minimierte Erwärmung der Bauelemente auf dem Niveau der N-Kanal-Gegenstücke sicherzustellen.
Zurück: Schutz von MOSFETs - Grundlagen erklärt Weiter: I / V-Tracker-Schaltung für Solar-MPPT-Anwendungen