In diesem Beitrag wird eine Gleichstrommotorsteuerung erläutert, die über eine konstante Drehmomentkompensation verfügt, damit der Motor unabhängig von der Belastung mit einer konstanten Drehzahl laufen kann.
Nachteil gewöhnlicher Drehzahlregler
Ein Nachteil der Mehrheit von einfache Geschwindigkeitsregler ist, dass sie den Motor nur mit einer vorbestimmten konstanten Spannung versorgen. Infolgedessen bleibt die Drehzahl nicht konstant und variiert aufgrund fehlender Drehmomentkompensation mit der Belastung des Motors.
Zum Beispiel nimmt in einer Modelleisenbahn mit einfachen Steuerungen die Geschwindigkeit des Zuges für die Steigungsgradienten allmählich ab und beschleunigt, während sie bergab fährt.
Daher weicht bei Modelleisenbahnen die Einstellung der Topfsteuerung zur Aufrechterhaltung einer ausgewählten Motordrehzahl ebenfalls in Abhängigkeit von der Last ab, die der Motor möglicherweise zieht.
Die in diesem Artikel erläuterte Motordrehzahlreglerschaltung mit konstantem Drehmoment behebt dieses Problem, indem die Motordrehzahl verfolgt und für eine vorgegebene Steuerungseinstellung konstant gehalten wird, unabhängig davon, wie stark der Motor belastet wird.
Die Schaltung kann in den meisten Modellen angewendet werden, die einen DC-Permanentmagnetmotor verwenden.
Berechnung des Gegen-EMK-Faktors
Die Spannung an den Motorklemmen besteht aus mehreren Faktoren. vom Motor erzeugt, und die Spannung fiel über den Ankerwiderstand ab.
Die Rückseite e.m.f. Die von der Motorwicklung erzeugte Drehzahl ist normalerweise proportional zur Motordrehzahl, was bedeutet, dass die Motordrehzahl durch Messen dieses Gegen-EMK-Gehalts überwacht werden kann. Das Hauptproblem besteht jedoch darin, die hintere e.m.f. von der Ankerwiderstandsspannung.
Angenommen, ein separater Widerstand ist in Reihe mit dem Motor geschaltet. Wenn ein gemeinsamer Einzelstrom durch diesen Widerstand und auch durch den Ankerwiderstand fließt, könnte der Spannungsabfall über den beiden Vorwiderständen durchaus dem Abfall über den Ankerwiderstand entsprechen.
Tatsächlich kann angenommen werden, dass, wenn diese beiden Widerstandswerte identisch sind, auch die beiden Spannungsgrößen über jeden der Widerstände ähnlich sind. Mit diesen Daten kann es möglich sein, den Spannungsabfall von R3 von der Motorspannung abzuziehen und den erforderlichen Rück-EMF-Wert für die Verarbeitung zu erhalten.

EMF für konstantes Drehmoment verarbeiten
Die vorgeschlagene Schaltung überwacht kontinuierlich den hinteren e.m.f. und regelt dementsprechend den Motorstrom, um sicherzustellen, dass für eine zugewiesene Topfsteuerungseinstellung der Gegenstrom zusammen mit der Motordrehzahl auf einem konstanten Drehmoment gehalten wird.
Um die Schaltungsbeschreibung zu vereinfachen, wird angenommen, dass P2 eingestellt und in seiner Mittelposition gehalten wird und der Widerstand R3 als Äquivalent zum Widerstandswert des Motorankers ausgewählt wird.
Berechnung der Motorspannung
Die Motorspannung kann durch Addition der Gegenleistung berechnet werden. Va mit der Spannung, die über den Motorinnenwiderstand Vr abfällt.
Wenn man bedenkt, dass R3 eine Spannung Vr abfällt, ist die Ausgangsspannung Vo gleich Va + 2 V.
Die Spannung am invertierenden Eingang (-) von IC1 beträgt Va + Vr und die am nicht invertierenden Eingang (+) beträgt Vi + (Va + 2Vr - Vi) / 2
Da die obigen zwei Spannungsgrößen gleich sein sollen, organisieren wir die obige Gleichung wie folgt:
Va + Vr = Vi + (Va + 2Vr - Vi) / 2
Die Vereinfachung dieser Gleichung ergibt Va = Vi.
Die obige Gleichung zeigt an, dass die Rückseite e.m.f. des Motors wird konstant auf dem gleichen Niveau wie die Steuerspannung gehalten. Dies ermöglicht es dem Motor, mit einer konstanten Drehzahl und einem konstanten Drehmoment für jede festgelegte Einstellung der P1-Drehzahleinstellung zu arbeiten.
P2 ist enthalten, um den Differenzpegel zu kompensieren, der zwischen dem R3-Widerstand und dem Ankerwiderstand bestehen kann. Dies wird ausgeführt, indem die Größe der positiven Rückkopplung am nichtinvertierenden Eingangs-Operationsverstärker angepasst wird.
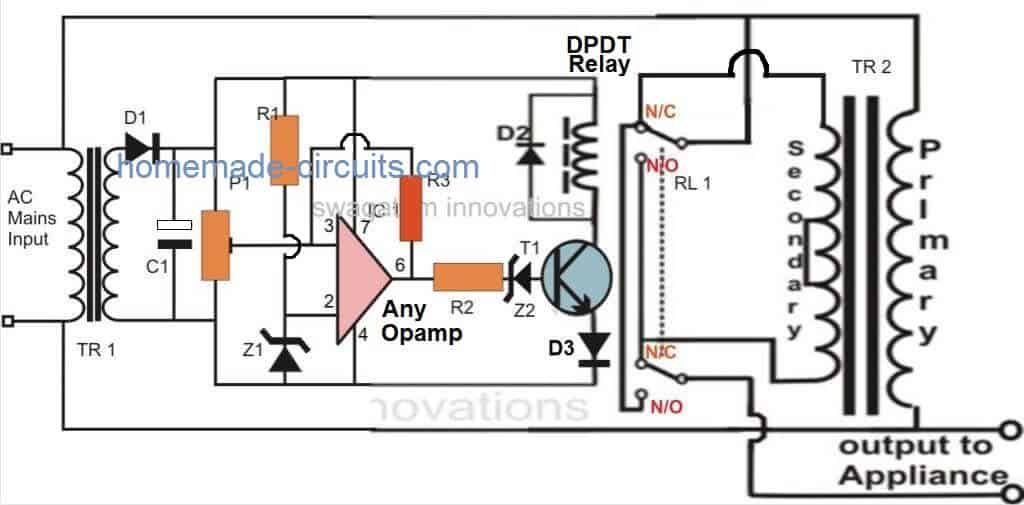
Der Operationsverstärker LM3140 vergleicht im Wesentlichen die am Motoranker entwickelte Spannung mit der Gegen-EMK-Entsprechung am Motor und regelt das Basispotential des T1 2N3055.
T1 wird als konfiguriert Emitterfolger regelt die Drehzahl des Motors entsprechend seinem Basispotential. Es erhöht die Spannung am Motor, wenn der Operationsverstärker eine höhere Gegen-EMK erkennt, was zu einer Erhöhung der Motordrehzahl führt und umgekehrt.
T1 sollte für eine ordnungsgemäße Funktion über einem geeigneten Kühlkörper montiert werden.
So richten Sie die Schaltung ein
Das Einrichten des Motordrehzahlreglers mit konstantem Drehmoment erfolgt durch Einstellen von P2 mit dem Motor mit variierender Last, bis der Motor unabhängig von den Belastungsbedingungen ein konstantes Drehmoment erreicht.
Wenn die Schaltung für Modelleisenbahnen angewendet wird, muss darauf geachtet werden, dass P2 nicht zu stark in Richtung P1 gedreht wird, was zu einer Verlangsamung der Modelleisenbahn führen kann, und umgekehrt darf P2 nicht zu stark in die entgegengesetzte Richtung gedreht werden, was zu einer Verlangsamung führen kann Die Zuggeschwindigkeit wird tatsächlich schneller, wenn man eine Steigung hinaufsteigt.
Zurück: Einfache Ni-Cd-Batterieladekreise untersucht Weiter: Mini-Transceiver-Schaltung