Einführung
Einphasen-Induktionsmotoren werden häufig in Geräten und Industriesteuerungen eingesetzt. Der Einphasen-Induktionsmotor PSC (Permanent Split Capacitor) ist der einfachste und am weitesten verbreitete Motor dieses Typs.
PSC-Motoren sind konstruktionsbedingt unidirektional, dh sie sind so konstruiert, dass sie sich in eine Richtung drehen. Durch Hinzufügen zusätzlicher Wicklungen und externer Relais und Schalter oder durch Verwendung von Getriebemechanismen kann die Drehrichtung geändert werden. In dieser Idee werden wir detailliert diskutieren, wie die Drehzahl eines PSC-Motors in beide Richtungen mithilfe eines PIC16F72-Mikrocontrollers und einer Leistungselektronik gesteuert werden kann.
Der Mikrocontroller PIC16F72 wurde ausgewählt, weil er einer der einfachsten und kostengünstigsten Universal-Mikrocontroller ist, die Microchip in seinem Portfolio hat. Obwohl die PWMs in der Hardware nicht vorhanden sind, um komplementäre PWM-Ausgänge mit eingefügtem Totband anzusteuern, werden alle PWMs in der Firmware unter Verwendung von Zeitgebern generiert und an Allzweck-Ausgangspins ausgegeben.
Was ist ein Frequenzumrichter?
Der Frequenzumrichter oder Frequenzumrichter ermöglicht die Steuerung der Drehzahl des Induktionsmotors durch Anlegen einer variierenden Frequenz der AC-Versorgungsspannung. Durch die Steuerung der Ausgangswechselstromfrequenz ist es möglich, den Motor je nach Anforderung mit unterschiedlichen Drehzahlen anzutreiben. Hierbei handelt es sich um Antriebe mit einstellbarer Drehzahl, die hauptsächlich in industriellen Anwendungen wie Pumpen, Lüftungssystemen, Aufzügen, Werkzeugmaschinenantrieben usw. verwendet werden. Es handelt sich im Wesentlichen um ein Energiesparsystem. Daher besteht die erste Anforderung darin, eine Sinuswelle mit unterschiedlichen Frequenzen für VFD zu erzeugen.
Welche Technologie wird in VFD angewendet?
Es ist das System, das Wechselstrom mit variierender Frequenz liefert, um die Drehzahl des Motors entsprechend den Anforderungen zu steuern. Einphasige Wechselrichter mit variabler Frequenz sind häufiger anzutreffen, da die meisten Geräte mit einphasiger Wechselstromversorgung arbeiten. Es besteht aus einem Vollwellen-Brückengleichrichter zur Umwandlung von 230/110 Volt Wechselstrom in ca. 300/150 Volt Gleichstrom. Der Ausgangsgleichstrom vom Brückengleichrichter wird durch einen hochwertigen Glättungskondensator geglättet, um die Wellen des Wechselstroms zu entfernen. Diese Gleichspannung mit fester Spannung wird dann der Frequenzerzeugungsschaltung zugeführt, die aus MOSFET- (Metalloxid-Feldeffekttransistor) / IGBT- (Isolated Gate Bipolar Transistor) Transistoren besteht. Diese MOSFET / IGBT-Schaltung empfängt den Gleichstrom und wandelt ihn mit variabler Frequenz in Wechselstrom um, um die Geschwindigkeit des Geräts zu steuern.
Die Frequenzänderung kann mit elektronischen Schaltungen oder einem Mikrocontroller erreicht werden. Diese Schaltung variiert die Frequenz der Spannung (PWM), die an die Gate-Ansteuerung der MOSFET / IGBT-Schaltung angelegt wird. Somit erscheint am Ausgang eine Wechselspannung unterschiedlicher Frequenz. Der Mikrocontroller kann so programmiert werden, dass die Frequenz des Ausgangs je nach Bedarf geändert wird.
Das VFD-System:
Das Gerät mit variabler Frequenz besteht aus drei Teilen, z. B. einem Wechselstrommotor, einer Steuerung und einer Betriebsschnittstelle.
Der in VFD verwendete Wechselstrommotor ist im Allgemeinen ein dreiphasiger Induktionsmotor, obwohl er einphasig ist Motor wird in einigen Systemen verwendet. Im Allgemeinen werden Motoren verwendet, die für den Betrieb mit fester Drehzahl ausgelegt sind. Einige Motorkonstruktionen bieten jedoch eine bessere Leistung bei VFD als die Standardausführung.
Der Controller-Teil ist die feste elektronische Stromrichterschaltung, um Wechselstrom in Gleichstrom und dann in Quasi-Sinus-Wechselstrom umzuwandeln. Der erste Teil ist der AC / DC-Wandlerabschnitt mit einer Vollweggleichrichterbrücke, üblicherweise einer dreiphasigen / einphasigen Vollwellenbrücke. Dieses DC-Zwischenprodukt wird dann unter Verwendung der Wechselrichterschaltschaltung in eine Quasi-Sinuswelle AC umgewandelt. Hier werden MOSFET / IGBT-Transistoren zum Invertieren von DC in AC verwendet.
Der Umrichterteil wandelt Gleichstrom in drei Wechselstromkanäle um, um den Drehstrommotor anzutreiben. Der Controller-Bereich kann auch so ausgelegt werden, dass er einen verbesserten Leistungsfaktor, weniger harmonische Verzerrungen und eine geringe Empfindlichkeit für Eingangs-Wechselstromtransienten bietet.
Volt / Hz-Steuerung:
Die Steuerschaltung regelt die Frequenz des dem Motor zugeführten Wechselstroms über die Steuermethode Volt pro Hertz. Der Wechselstrommotor benötigt eine variable angelegte Spannung, wenn sich die Frequenz ändert, um das angegebene Drehmoment zu erhalten. Wenn der Motor beispielsweise für 440 Volt bei 50 Hz ausgelegt ist, muss der an den Motor angelegte Wechselstrom auf die Hälfte (220 Volt) reduziert werden, wenn sich die Frequenz auf die Hälfte (25 Hz) ändert. Diese Regelung basiert auf den Volt / Hz. Im obigen Fall beträgt das Verhältnis 440/50 = 8,8 V / Hz.
 Andere Methoden zur Spannungsregelung:
Andere Methoden zur Spannungsregelung:
 Andere Methoden zur Spannungsregelung:
Andere Methoden zur Spannungsregelung:Neben der Volt / Hz-Steuerung bieten fortgeschrittenere Methoden wie Direct Torque Control oder DTC, Raumvektor-Pulsweitenmodulation (SVPWM) usw. werden auch verwendet, um die Drehzahl des Motors zu steuern. Durch Steuern der Spannung im Motor können der Magnetfluss und das Drehmoment präzise gesteuert werden. Bei der PWM-Methode erzeugen die Wechselrichterschalter eine Quasi-Sinuswelle durch eine Reihe schmaler Impulse mit pseudosinusförmig variierenden Impulsdauern.
Bedienoberfläche:
In diesem Abschnitt kann der Benutzer den Motor starten / stoppen und die Geschwindigkeit einstellen. Weitere Einrichtungen sind das Umkehren des Motors, das Umschalten zwischen manueller und automatischer Geschwindigkeitsregelung usw. Die Bedienoberfläche besteht aus einem Bedienfeld mit Anzeige oder Anzeigen und Messgeräten zur Anzeige der Motordrehzahl, der angelegten Spannung usw. Im Allgemeinen wird ein Satz von Tastaturschaltern bereitgestellt zur Steuerung des Systems.
Eingebauter Soft-Start:
Bei einem normalen Induktionsmotor, der mit einem Wechselstromschalter eingeschaltet wird, ist der aufgenommene Strom viel höher als der Nennwert und kann mit zunehmender Beschleunigung der Last ansteigen, um die volle Drehzahl des Motors zu erreichen.
Andererseits wird in einem VFD-gesteuerten Motor anfänglich eine niedrige Spannung bei niedriger Frequenz angelegt. Diese Frequenz und Spannung steigen mit einer kontrollierten Geschwindigkeit an, um die Last zu beschleunigen. Dadurch entsteht fast mehr Drehmoment als der Nennwert des Motors.
VFD-Motorkommutierung ::
Die Frequenz und die angelegte Spannung werden zuerst auf einen gesteuerten Pegel reduziert und dann weiter verringert, bis sie Null werden und der Motor abschaltet.
Anwendungsschaltung zur Steuerung der Drehzahl des Einphasen-Induktionsmotors
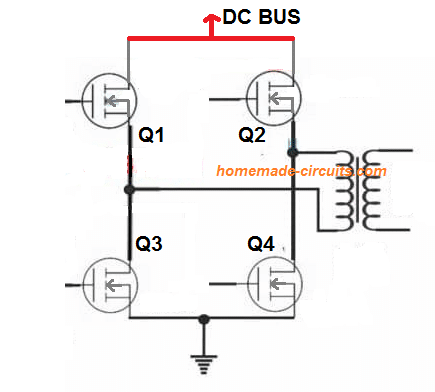
Der Ansatz ist relativ einfach, was den Stromkreis und den Steuerkreis betrifft. Auf der Eingangsseite werden Spannungsverdoppler verwendet, und auf der Ausgangsseite wird eine H-Brücke oder ein 2-Phasen-Wechselrichter verwendet, wie in Abbildung 2 gezeigt. Ein Ende der Haupt- und Startwicklung ist mit jeder Halbbrücke und der verbunden andere Enden sind mit dem Sternpunkt der Wechselstromversorgung verbunden.
Die Steuerschaltung benötigt vier PWMs mit zwei komplementären Paaren mit einem ausreichenden Totband zwischen den komplementären Ausgängen. Die PWM-Totbänder sind PWM0-PWM1 und PWM2-PWM3. Der PIC16F72 verfügt nicht über PWMs in der Hardware, die so ausgegeben werden, wie wir es benötigen. In Bezug auf VF wird der Gleichstrombus durch Variieren der Frequenz und Amplitude synthetisiert. Dies ergibt zwei phasenverschobene Sinusspannungen.
Wenn die an die Hauptwicklung angelegte Spannung der Startwicklung um 90 Grad nacheilt, läuft der Motor in einer (d. H. Vorwärts) Richtung. Wenn wir die Drehrichtung ändern wollen, soll die an die Hauptwicklung angelegte Spannung die Startwicklung leiten.
Ich hoffe, Sie haben aus dem obigen Artikel eine Vorstellung vom Frequenzumrichter für den Induktionsmotor. Also, wenn Sie Fragen zu diesem Konzept oder der elektrischen und haben elektronisches Projekt Bitte hinterlassen Sie den Kommentarbereich unten.