In diesem Projekt lernen wir, wie man eine einfache unipolare Schrittmotortreiberschaltung unter Verwendung eines 555-Zeitgeber-IC herstellt. Neben dem 555-Timer benötigen wir auch die IC CD 4017, die ein Dekadenzähler-IC ist.
Von Ankit Negi
Jeder unipolare Motor kann an diese Schaltung angeschlossen werden, um bestimmte Aufgaben auszuführen. Sie müssen jedoch zuerst einige kleine Änderungen vornehmen.
Die Drehzahl des Schrittmotors kann über ein Potentiometer gesteuert werden, das zwischen Entladung und Schwelle angeschlossen ist Pin des 555 Timers .
Grundlagen des Schrittmotors
Schrittmotoren werden in Bereichen eingesetzt, in denen eine bestimmte Drehung erforderlich ist, die mit herkömmlichen Gleichstrommotoren nicht erreichbar sind. Eine typische Anwendung eines Schrittmotors ist ein 3D-DRUCKER. Sie finden zwei Arten von beliebten Schrittmotoren: UNIPOLAR und BIPOLAR.
Wie der Name schon sagt, enthält der unipolare Schrittmotor Wicklungen mit gemeinsamem Draht, die leicht einzeln mit Strom versorgt werden können.
Während der bipolare Schrittmotor keinen gemeinsamen Anschluss zwischen den Spulen hat, aufgrund dessen er nicht einfach unter Verwendung der vorgeschlagenen Schaltung angetrieben werden kann. Um einen bipolaren Schrittmotor anzutreiben, benötigen wir eine H-Brückenschaltung.
KOMPONENTEN:
1. 555 TIMER IC

zwei. CD 4017 IC

3. WIDERSTÄNDE 4,7 K, 1 K


4. POTENTIOMETER 220K

5. 1 uf Kondensator

6. 4 DIODEN 1N4007

7. 4 TRANSISTOREN 2N2222

8. UNIPOLARER SCHRITTMOTOR

9. Gleichstromquelle
ZWECK VON 555 TIMER:
Hier wird ein Timer 555 benötigt, um Taktimpulse mit einer bestimmten Frequenz zu erzeugen (kann mit einem 220k-Topf variiert werden), die die Drehzahl des Schrittmotors bestimmt.
Details zur Pinbelegung des IC 555

ZWECK VON CD4017:
Wie oben bereits erwähnt, handelt es sich um einen Dekadenzähler-IC, d. H. Er kann bis zu 10 Taktimpulse zählen. Das Besondere an diesem IC ist, dass er über einen eigenen eingebauten Decoder verfügt. Aufgrund dessen müssen Sie keinen zusätzlichen IC hinzufügen, um Binärzahlen zu decodieren.
4017 zählt bis zu 10 Taktimpulse ab 555 Stunden und gibt einen hohen Ausgang, der jedem Taktimpuls nacheinander von seinen 10 Ausgangspins entspricht. Zu einer Zeit ist nur ein Stift hoch.
Zweck der Transistoren:
Es gibt zwei Zwecke des Transistors hier:
1. Transistoren wirken hier wie Schalter und erregen jeweils eine Spule.
2. Transistoren lassen einen hohen Strom durch sie und dann den Motor fließen, wodurch der 555-Timer vollständig ausgeschlossen wird, da er nur sehr wenig Strom liefern kann.
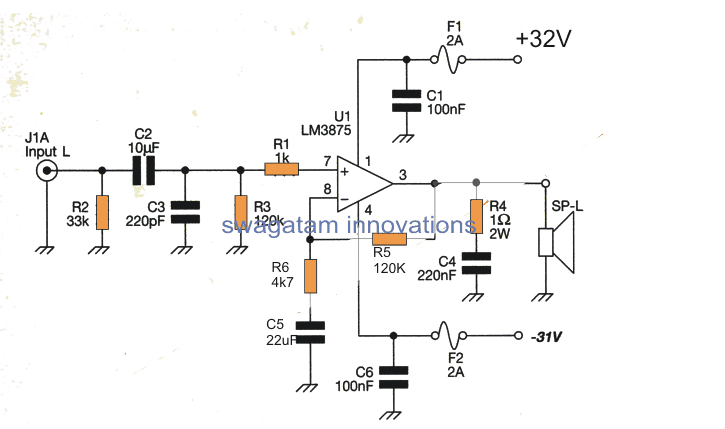
SCHALTPLAN:

Stellen Sie die Verbindungen wie in der Abbildung gezeigt her.
1. Verbinden Sie Pin 3 oder den Ausgangspin des 555-Timers mit Pin 14 (Clock-Pin) des IC 4017.
2. Verbinden Sie den Freigabestift oder den 13. Stift von 4017 mit Masse.
3. Verbinden Sie die Pins 3,2,4,7 nacheinander mit den Transistoren 1,2,3,4.
4. Verbinden Sie den 10. und 15. Pin über einen 1k-Widerstand mit Masse.
5. Verbinden Sie das gemeinsame Kabel des Schrittmotors mit dem Plus der Versorgung.
6. Schließen Sie andere Drähte des Schrittmotors so an, dass die Spulen nacheinander mit Strom versorgt werden, um eine volle Umdrehung ordnungsgemäß durchzuführen (siehe Datenblatt des vom Hersteller bereitgestellten Motors).
WARUM IST AUSGANGS-PIN 10 DES IC 4017 MIT SEINER PIN 15 (RESET-PIN) VERBUNDEN?
Wie oben bereits erwähnt, zählt 4017 die Taktimpulse nacheinander bis zum 10. Taktimpuls und gibt dementsprechend einen hohen Ausgang an den Ausgangspins aus, wobei jeder Ausgangspin hoch geht.
Dies führt zu einer gewissen Verzögerung der Motordrehung, die nicht erforderlich ist. Da wir nur die ersten vier Stifte für eine vollständige Umdrehung des Motors oder die ersten vier Dezimalzahlen von o bis 3 benötigen, wird Stift-Nr. 10 ist mit Pin 15 verbunden, so dass nach dem 4. Zählen der IC zurückgesetzt wird und das Zählen wieder von vorne beginnt. Dies stellt sicher, dass die Motordrehung nicht unterbrochen wird.
ARBEITEN:
Wenn Sie den Schaltkreis einschalten, dreht sich der Motor nach dem ordnungsgemäßen Herstellen der Verbindungen schrittweise. Der Timer 555 erzeugt Taktimpulse in Abhängigkeit von den Werten von Widerstand, Potentiometer und Kondensator.
Wenn Sie den Wert einer dieser drei Komponenten ändern, ändert sich die Taktfrequenz.
Diese Taktimpulse werden an den IC CD 4017 gegeben, der dann die Taktimpulse nacheinander zählt und 1 als Ausgang an Pin Nr. 3,2,4,7 gibt und diesen Vorgang kontinuierlich wiederholt.
Da der Transistor Q1 mit Pin 3 verbunden ist, schaltet er zuerst den Transistor Q2 ein, gefolgt von Q3 und Q4. Aber wenn ein Transistor eingeschaltet ist, bleiben alle anderen ausgeschaltet.
Wenn Q1 eingeschaltet ist, wirkt es wie ein geschlossener Schalter und Strom fließt durch den gemeinsamen Draht zu Draht 1 und dann durch den Transistor Q1 zur Masse.
Dadurch wird die Spule 1 erregt und der Motor dreht sich in einem Winkel, der von der Taktfrequenz abhängt. Dann passiert dasselbe mit Q2, das die Spule 2 gefolgt von der Spule 3 und der Spule 4 erregt. Somit wird eine vollständige Umdrehung erhalten.
Wenn das Potentiometer gedreht wird:
Nehmen wir an, die anfängliche Position des Topfes ist so, dass zwischen Entladung und Schwellenstift ein maximaler Widerstand (220 k) besteht. Die Formel für die Frequenz des Ausgangstaktimpulses lautet:
F = 1,44 / (R1 + 2R2) C1
Aus der Formel geht hervor, dass die Frequenz der Taktimpulse mit zunehmendem Wert von R2 abnimmt. Wenn also der Wert von R2 oder Pot maximal ist, ist die Frequenz minimal, wodurch der IC 4017 langsamer zählt und eine verzögertere Ausgabe liefert.
Wenn der Wert des Widerstands R2 abnimmt, nimmt die Frequenz zu, was eine minimale Verzögerung zwischen den Ausgängen des IC 4017 verursacht. Daher dreht sich der Schrittmotor schneller.
Somit bestimmt der Wert des Potentiometers die Drehzahl des Schrittmotors.
SIMULATION VIDEO:
Hier können Sie deutlich sehen, wie sich die Drehzahl des Motors mit dem Widerstand R2 ändert. Sein Wert wird zuerst verringert und dann erhöht, was wiederum zuerst die Drehzahl des Schrittmotors erhöht und dann verringert.
Zurück: Wie Kurbel-Taschenlampen funktionieren Weiter: Arduino Tachometer-Schaltung für präzise Messwerte