

Kriegsfeld-Spionageroboter mit Nachtsichtkamera
Der Spionageroboter wird, wie der Name schon sagt, zum Ausspionieren feindlicher Gebiete verwendet. Seine Anwendungen können sein:
- In Kriegszeiten können damit Informationen aus dem feindlichen Gelände gesammelt, an einem weit sicheren Ort überwacht und ein Plan für den Gegenangriff erstellt werden.
- Verfolgen Sie Standorte terroristischer Organisationen und planen Sie dann zu einem geeigneten Zeitpunkt einen Angriff.
- Überwachung von von Katastrophen betroffenen Gebieten, in die Menschen nicht gehen können.
Eine kurze Idee über War Field Spying Robot
Lassen Sie uns eine kurze Vorstellung davon haben, wie wir einen Roboter in Kriegsfeldern für Spionagezwecke einsetzen können. Alles, was benötigt wird, ist eine drahtlose Kamera, die an der Roboterschaltung angebracht ist und Bilder und Videos von feindlichen Gebieten aufnimmt und diese Bilder überträgt, die von der Empfangseinheit des Fernsehgeräts empfangen werden.
Wir können einen einfachen Prototyp eines Krieges entwerfen Feldspionageroboter Dies kann ferngesteuert werden und die von der Kamera übertragenen Bilder können auf einem Fernseher überwacht und analysiert werden.
Hardware-Implementierung des War Field Spying Robot
Alles, was wir brauchen, sind die folgenden Komponenten, um einen Spionageroboter für das Kriegsfeld zu entwerfen, abgesehen von einer Basis mit Rädern und Motoren.
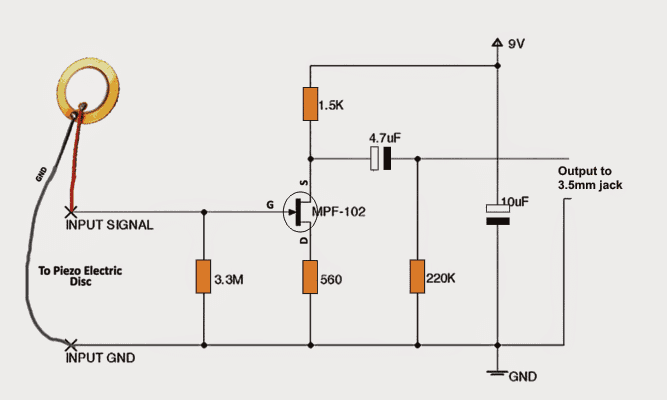
- Sensoreinheit - Eine drahtlose Nachtsichtkamera: Abgesehen davon, woraus eine Basiskamera besteht, besteht sie aus einer Sendeeinheit. Es erfasst Bilder und überträgt diese Bilder in Form von digitalen Signalen über den Sender, die von der an das Fernsehgerät oder den Computer angeschlossenen Empfängereinheit empfangen werden. Die Kamera kann bis zu 30 Meilen vom Empfänger entfernt sein. EIN Nachtsichtkamera kann eine Beleuchtung erhalten, indem entweder das sichtbare Licht mit Bildverstärkern verstärkt wird oder Infrarotlicht direkt von Objekten verwendet wird - Wärmebild oder Infrarotlicht, das von Objekten im nahen Infrarot reflektiert wird.
- Eine Empfängereinheit: Der Roboter besteht auch aus einer Empfängereinheit, die die Befehlssignale zur Steuerung der Motoren und damit der Robotereinheit empfängt.
- Aktoren: Es besteht aus zwei Gleichstrommotoren als Aktuatoren, die dem Roboter eine Rückwärts- und Vorwärtsbewegung ermöglichen.
- Steuergerät: Es besteht aus einer Fernsendeeinheit, die aus einem Mikrocontroller, einem Codierer und einem HF-Modul besteht, und einer Empfängereinheit, die in die Schaltung eingebettet ist und aus einem HF-Empfängermodul, einem Mikrocontroller und einem Decodierer besteht.
Wie funktioniert eine Nachtsichtkamera eines Spionageroboters im Kriegsfeld?
Die im Roboter eingebettete kabellose Nachtsichtkamera besteht aus einem kabellosen Sender. Eine Gruppe von IR-LEDs wird platziert, um die Bildquellen mit IR-Licht zu versorgen. Der Grund, warum IR-Licht bevorzugt wird, ist, dass es nachts normalerweise dunkel ist und da jede Kamera Licht zur Beleuchtung benötigt, ist Infrarotlicht die am meisten bevorzugte Option, da alle Objekte einen Bereich von Infrarotlicht emittieren. Die Kamera wird mit einer 12-V-Batterie betrieben und nimmt diese Bilder auf und überträgt sie an die Empfängereinheit, die an eine Fernseheinheit angeschlossen ist. Die Bilder werden von der Sendeeinheit in digitale Signale umgewandelt, und die Empfangseinheit empfängt diese digitalen Signale und wandelt sie wieder in Bilder um. Diese Bilder oder Videos werden dann auf einer Fernseheinheit überwacht und analysiert.

Blockdiagramm, das die grundlegende Arbeitsweise des Roboters mit der Nachtsichtkamera zeigt
Steuerung des Kriegsfeld-Spionageroboters
Die gesamte Steuerung des Roboters erfolgt aus der Ferne. Es besteht aus einem Senderabschnitt, der die erforderlichen Informationen an den Empfängerabschnitt überträgt. Der Roboter wird einfach durch Drücken einiger Tasten auf der Senderseite abgedeckt.

Blockdiagramm, das den Spionageroboter des Senders des Kriegsfeldes zeigt
Die Sendeeinheit besteht aus einem Codierer, der parallele Dateneingaben vom Mikrocontroller über die Drucktasten empfängt und diese parallelen Daten im seriellen Format über das HF-Modul überträgt. Beim Drücken des jeweiligen Druckknopfs wird der Mikrocontroller so programmiert, dass relevante Signale parallel an den Encoder gesendet werden. Der Codierer wandelt diese parallelen Signale in eine serielle Form um, die vom HF-Modul übertragen wird. Diese seriellen Daten werden mit einem Trägersignal unter Verwendung eines HF-Senders moduliert und sind der Sender. Wenn wir beispielsweise die linke Taste drücken, sendet der Mikrocontroller den Befehl über den Encoder und das HF-Modul an die Empfängereinheit.

Blockdiagramm, das den Empfänger des Spionageroboters des Kriegsfeldes zeigt
Die Empfängereinheit besteht aus einem HF-Empfängermodul, das das empfangene Signal demoduliert, und einem Decoder, der die seriellen Daten über das HF-Empfängermodul empfängt und in eine parallele Form umwandelt. Der Mikrocontroller verwendet diese Daten, um dem Motortreiber-IC ein geeignetes Steuersignal zu geben, um den Betrieb der beiden Motoren zu steuern. Somit kann der Roboter durch Steuern des Motors vorwärts oder rückwärts bewegt werden, während die Kamera gleichzeitig ihre Arbeit erledigt.
Roboter im Militär
Nachdem wir eine kurze Vorstellung von Kriegsfeldrobotern hatten, wollen wir uns kurz an praktische Roboter in der Verteidigung erinnern.
Eines der Grundmerkmale von Robotern, die bei militärischen Operationen eingesetzt werden, ist, dass sie nicht vollautomatisch sind. Sie werden tatsächlich von Menschen ferngesteuert. Die Roboter oder unbemannten Maschinen, wie sie genannt werden, können jedes sich bewegende Objekt oder ein fliegendes Flugzeug sein, das mit allen erforderlichen Geräten wie Sensoren, LIDARS (Laserbasierte Kommunikationsradare), Kameras usw. ausgestattet ist. Ihre Operationen können von der Entsorgung von Bomben bis zur Vermessung des Feindes reichen Gebiete.
Es gibt 3 Arten unbemannter Maschinen, die bei militärischen Operationen eingesetzt werden:
- Unbemanntes Bodenfahrzeug (UGV): Sie werden für Bodenzwecke verwendet. Sie können eine schwere Last tragen, sich auf unebenem Gelände bewegen und sind mit verschiedenen Sensoren und Kameras ausgestattet.

Gladiator Tactical UGV
- Unbemanntes Luftfahrzeug (UAV): Sie werden zum Tragen von Luftwaffen verwendet und sind im Grunde genommen Flugmaschinen.

Unbemanntes Luftfahrzeug MQ-9 Reaper
- Unbemanntes Unterwasserfahrzeug (UUV): Dies sind im Grunde U-Boote oder Maschinen, die unter Wasser vermessen können.

Talisman UUV
Nachdem wir den Kriegsfeldroboter kennen, können wir uns der Aufgabe des Wissens widmen über den Einsatz von Robotern bei den militärischen Operationen unseres Landes und wie sich unsere Verteidigungsorganisation in diesem Bereich entwickelt?
Bildnachweis:
- Gladiator Tactical UGV von Wikimedia
- MQ-9 Reaper Unmanned Aerial Vehicle von Wikimedia
- Talisman UUV von Ingenieursgarage






{kind=link}
{kind=link}