Obwohl Quadcopter-Fernbedienungsschaltungen sehr einfach vom Markt oder von einem Online-Shop bezogen werden können, darf ein begeisterter elektronischer Bastler nie erfahren, wie diese tatsächlich funktionieren und ob diese zu Hause gebaut werden können oder nicht.
In diesem Artikel werden wir versuchen, eine zu erstellen einfache Quadcopter-Fernbedienungsschaltung Verwendung diskreter Komponenten und Verwendung von HF-Fernbedienungsmodulen und ohne Einbeziehung der komplexen MCU-basierten Schaltkreise.
Die Schritt-für-Schritt-Anleitung wird den interessierten Hobbyisten tatsächlich verständlich machen, wie einfach ein Quadcopter mit einem PWM-Konzept gesteuert werden kann.
Wir haben bereits gelernt die Quadcopter-Grundlagen Lassen Sie uns nun einen Teil der Fernbedienung untersuchen, der letztendlich dazu beiträgt, das Gerät aus der Ferne zu fliegen.
Grundmodule erforderlich
Die Hauptzutaten, die für das Projekt erforderlich sein können, sind wie folgt angegeben:
Grundsätzlich benötigen wir die folgenden 3 Schaltungsstufen:
1) 4-Wege-HF-Fernbedienung Tx, Rx-Module - 1 Satz
2) IC 555-basierte PWM-Generatorschaltungen - 4nos
3) BLDC-Motorsteuerkreise - 4Nr
Da es sich um eine hausgemachte Version handelt, können wir einige Ineffizienzen bei der vorgeschlagenen Konstruktion erwarten, z. B. das Fehlen von Joysticks für die Steuerungen, die durch Töpfe oder Potentiometer ersetzt werden. Dennoch ist zu erwarten, dass die Funktionsfähigkeit des Systems mit der des Systems übereinstimmt professionelle Einheiten.
Die Hand-PWM-Sendeeinheit besteht im Wesentlichen aus dem Tx-Fernbedienungsmodul, das in 4 diskrete PWM-Steuerschaltungen integriert ist, während der Quadcopter in 1 Rx-Schaltung eingeschlossen sein muss, die in 4 diskrete BLDC-Treiberschaltungen integriert ist.
Beginnen wir mit den Quadcopter-Motorschaltungen und sehen, wie die BLDC-Motorsteuerung konfiguriert und mit der Rx-Schaltung verbunden werden muss.
Quadcopter PWM-Empfängerschaltung
In einem der vorherigen Beiträge haben wir erfahren, wie eine vielseitige BLDC-Motorsteuerung unter Verwendung eines einzelnen Chips gebaut werden kann. Diese Konstruktion ist jedoch nicht für den Betrieb relativ schwererer Motoren eines Quadcopters ausgelegt, weshalb sie möglicherweise für die vorliegende Anwendung nicht geeignet ist.
Eine 'Big Brother' -Option für die oben genannte Schaltung ist glücklicherweise verfügbar und eignet sich perfekt für den Antrieb von Quadcopter-Motoren. Vielen Dank an TEXAS INSTRUMENTS für die Bereitstellung solch wunderbarer, für die Einzelchip-Anwendung spezifizierter Schaltungsmodule.
Weitere Informationen zu diesem Hochstrom-BLDC-Treiber-IC finden Sie im folgenden PDF-Datenblatt desselben
https://homemade-circuits.com/wp-content/uploads/2015/10/slwu083a.pdf
Der folgende Aufbau zeigt das vollständige Schaltbild der Quadcopter-Motortreibersteuerung unter Verwendung des DRV11873-IC, einer eigenständigen BLDC-Motorschaltung mit niedrigem Strom, die aus allen erforderlichen Schutzfunktionen wie Überlastschutz, Wärmeschutz usw. besteht. Dieses Modul bildet im Wesentlichen den Regler für unsere derzeitige Quadcopter-Einheit.
Weitere Informationen zu diesem Design und zu den Leiterplattendetails finden Sie im folgenden Originaldokument:
http://www.ti.com/lit/ds/symlink/drv11873.pdf

Wie es funktioniert
Die Pinbelegung FS und FG des IC dient zur Verbesserung des IC durch zusätzliche Steuerungen durch externe Schaltkreise. Da wir diese Funktionen in unserem Design nicht verwenden, können diese Pins unbenutzt bleiben und über einen 100K-Widerstand an die positive Leitung angeschlossen werden.
Die RD-Pinbelegung des IC bestimmt die Drehrichtung des Motors. Das Verbinden dieses Pins mit Vcc über einen 100K-Widerstand ermöglicht eine Drehung des Motors gegen den Uhrzeigersinn, während er nicht angeschlossen ist. Dies bewirkt das Gegenteil und ermöglicht es dem Motor, sich im Uhrzeigersinn zu drehen.
Pin # 16 ist der PWM-Eingang, der zum Einspeisen eines PWM-Eingangs von einer externen Quelle verwendet wird. Durch Variieren des Arbeitszyklus der PWM wird die Drehzahl des Motors entsprechend geändert.
Die FR- und CS-Pinbelegung sind ebenfalls für den Bedarf irrelevant und können daher nicht verwendet werden, wie in der Abbildung gezeigt, und über einen 100K-Widerstand an die positive Leitung angeschlossen werden.
Die Pinbelegung U, V, W sind die Motorausgänge, die mit dem jeweiligen Quadcopter BLDC 3-Phasen-Motor verbunden werden müssen.
Die COM-Pinbelegung dient zum Anschließen des gemeinsamen Kabels des 3-Phasen-Motors. Wenn Ihr Motor kein gemeinsames Kabel hat, können Sie dies einfach simulieren, indem Sie 3 Nr. 2k2-Widerstände an die U-, W- und W-Pins anschließen und dann deren gemeinsame anschließen endet mit dem COM-Pin des IC.
Das Schema zeigt auch einen IC 555, der im PWM-Astable-Circuit-Modus konfiguriert ist. Dies wird ein Teil des Schaltungsmoduls und der PWM-Ausgang von seinem Pin # 7 ist mit dem PWM-Eingang der DRV-IC-Schaltung verbunden zu sehen, um die 4 Motoren mit einer konstanten Grunddrehzahl zu initiieren und dem Motor ein konstantes Schweben zu ermöglichen Geschwindigkeit an einer bestimmten Stelle.
Dies schließt die Haupt-ELC-Schaltung oder die BLDC-Treiberschaltung für unser Quadcopter-Design ab.
Wir werden vier solcher Module für die vier Motoren in unserem Quadcopter-Design benötigen.
Das heißt, 4 solcher DRV-ICs müssen zusammen mit der PWM-Stufe des IC 555 jedem der 4 Motoren des Quadcopters zugeordnet werden.
Diese Module stellen sicher, dass normalerweise alle 4 Motoren auf eine vorbestimmte Drehzahl eingestellt sind, indem sie ein festes und identisches PWM-Signal an jeden der relevanten DRV-Controller-ICs anlegen.
Lassen Sie uns nun lernen, wie die PWM über eine Fernbedienung geändert werden kann, um die Drehzahl des einzelnen Motors mit einer normalen 4-Kanal-Fernbedienung zu ändern.
Das RF-Empfängermodul (PWM-Decoder)

Die obige Schaltung zeigt die HF-Fernschaltung des Empfängers, die im Quadcopter untergebracht sein soll, um externe drahtlose PWM-Daten vom Fernsender des Benutzers zu empfangen und die Signale dann entsprechend zu verarbeiten, um die zugehörigen DRV-Steuerungsmodule zu versorgen, wie in der Vorherige Sektion.
Die 4 als PWM # 1… .PWM # 4 bezeichneten Ausgänge müssen mit dem PWM-Pin # 15 des DRV-IC verbunden werden, wie im vorherigen Diagramm angegeben.
Diese PWM-Pinbelegung von der HF-Empfängereinheit wird aktiviert, wenn der Benutzer die entsprechende Taste in seinem Senderhandgerät drückt.
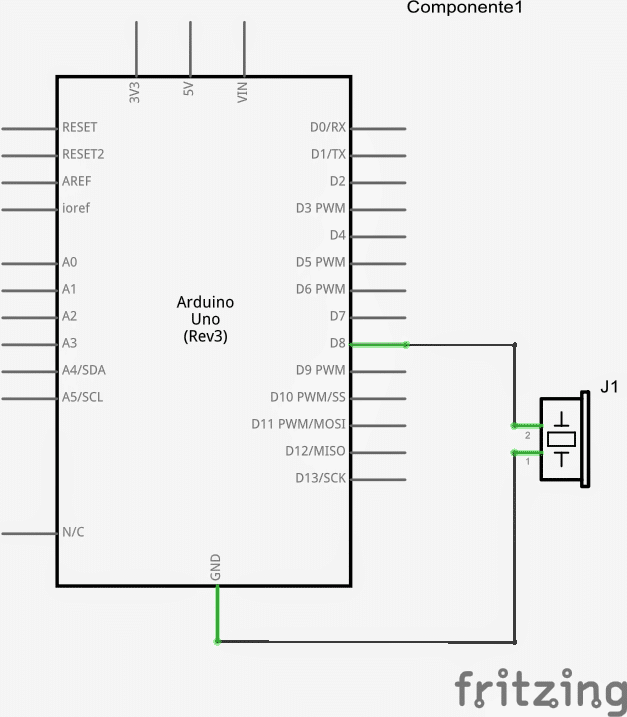
Wie der HF-Sender verkabelt werden muss (PWM-Encoder)
Im obigen Abschnitt haben wir den Rx oder die Fernempfängerschaltung besprochen und wie ihre 4 Ausgänge mit den ESC-Treibermodulen des Quadcopter-Motors verbunden werden müssen.
Hier sehen wir, wie der einfache HF-Sender erstellt und mit PWM-Schaltkreisen verdrahtet werden muss, um die PWM-Daten drahtlos an die Quadcopter-Empfängereinheit zu übertragen, so dass die Drehzahlen des einzelnen Motors einfach per Knopfdruck gesteuert werden, was letztendlich die Quadcopter, um die Richtung oder Geschwindigkeit gemäß den Vorlieben des Benutzers zu ändern.

Die oben gezeigte Schaltung zeigt die Verdrahtungsdetails des Sendermoduls. Die Idee sieht ziemlich einfach aus. Die Hauptsenderschaltung besteht aus dem TSW434-Chip, der die codierten PWM-Signale in die Atmosphäre überträgt, und dem HT12E, der für die Einspeisung der codierten Signale in den TSW-Chip verantwortlich ist.
Die PWM-Signale werden von 4 separaten IC 555-Schaltungsstufen erzeugt, die mit derjenigen identisch sein können, die zuvor im DRV-Steuerungsmodul erörtert wurde.
Der PWM-Inhalt der 4 ICs ist über 4 diskrete Drucktasten, die als SW1 ---- SW4 gekennzeichnet sind, an den jeweiligen Pinbelegungen des Encoder-IC HT12E abgeschlossen.
Jede dieser Tasten entspricht und schaltet die identische Pinbelegung des Empfängermoduls um, die wir zuvor besprochen und als PWM # 1, PWM # 2… ..PWM # 4 angegeben haben.
Das Drücken von SW1 kann dazu führen, dass der PWM # 1-Ausgang der Empfängereinheit aktiv ist. Dadurch wird die Pinbelegung die empfangenen decodierten PWM-Signale vom Sender an das zugehörige DRV-Modul weiterleiten und der betreffende Motor veranlasst, seine Drehzahl entsprechend zu ändern.
In ähnlicher Weise kann durch Drücken von SW2,3,4 die Drehzahl der anderen 3 Quadcopter-Motoren gemäß den Wünschen des Benutzers beeinflusst werden.
IC 555 PWM-Schaltung
Die 4 PWM-Schaltungen, die im obigen HF-Senderhandgerät gezeigt sind, können unter Bezugnahme auf das folgende Diagramm aufgebaut werden, das genau demjenigen ähnlich ist, das unsere DRV-Regler-ESC-Schaltung gesehen hat.

Bitte denken Sie daran, dass der 5K-Topf die Form eines normalen Topfes haben kann und dieser Topf zusätzlich mit den Tasten zur Auswahl unterschiedlicher Drehzahlen an den entsprechenden Motoren verwendet werden kann.
Das heißt, wenn Sie eine ausgewählte Taste gedrückt halten und gleichzeitig den entsprechenden 5KPWMpot bewegen, kann der Quadcopter seine Geschwindigkeit in die vorgesehene Richtung erhöhen oder verringern.
Alternativ könnte die PWM zunächst auf einen höheren oder niedrigeren Pegel eingestellt und dann die entsprechende Taste gedrückt werden, damit der entsprechende Quadcopter-Motor die bevorzugte Geschwindigkeit gemäß der PWM-Einstellung erreichen kann.
Quadcopter-Motorspezifikation
Die oben erläuterte Qiadcopter-Fernbedienungsschaltung ist nur zur Anzeige vorgesehen und kann nicht zum Heben von Lasten oder einer Kamera verwendet werden. Dies impliziert, dass die in der Konstruktion verwendeten Motoren vorzugsweise ein Typ mit niedrigem Strom sein sollten.
Der DRV11873 IC ist für den Betrieb von Motoren mit 15 V, 1,5 Ampere oder etwa 20 Watt ausgelegt. Daher kann jeder 3-Phasen-BLDC-Motor mit 15 bis 30 Watt für diesen Zweck verwendet werden.
Die Batterie für dieses Quadcopter-Design kann eine beliebige 12-V-Lipo-Pr-Li-Ionen-Batterie sein, die eine 15-V-Spitze bei 1,5 Ampere Dauerstrom liefern kann.
Spezifikationsdetails
1306N Brushless Outrunner Miniatur-Gleichstrommotor
Typ: Mikromotor
Konstruktion: Permanentmagnet
Kommutierung: Bürstenlos
Geschwindigkeit (U / min): 2200 U / min / v
Dauerstrom (A): 1,5 ~ 2,6 A.
Spannung (V): 7,4 ~ 11,1 V.
Miniatur-Gleichstrommotor: AX-1306N
Gewicht: 8g
Wellendurchmesser: 1,5 mm
Batterie LI-PO: 2-3s
Betriebsstrom: 1,5 ~ 2,6A
Maximaler Wirkungsgrad: 67%

Zurück: Sensorloser BLDC-Motortreiberkreis Weiter: Heizungssteuerkreis mit Drucktasten