Wir alle haben viel über Buck- und Boost-Schaltkreise gehört und wissen, dass diese Schaltkreise im Grunde genommen in SMPS-Designs zum Erhöhen oder Verringern einer bestimmten Spannung am Eingang verwendet werden. Das Interessante an dieser Technologie ist, dass sie die oben genannten Funktionen mit vernachlässigbarer Wärmeerzeugung ermöglicht, was zu äußerst effizienten Umwandlungen führt.
Was ist Buck-Boost, wie funktioniert es?
Lassen Sie uns das Konzept im ersten Abschnitt lernen, ohne viele technische Details zu berücksichtigen, damit es selbst für Neulinge leichter zu verstehen ist, was genau das Buck-Boost-Konzept ist.
Unter den drei grundlegenden Topologien mit den Namen Buck, Boost und Buck-Boost ist die dritte populärer, da beide Funktionen (Buck-Boost) über eine einzige Konfiguration verwendet werden können, indem nur die Eingangsimpulse geändert werden.
In der Buck-Boost-Topologie haben wir hauptsächlich eine elektronische Schaltkomponente, die in Form eines Transistors oder eines Mosfets vorliegen kann. Diese Komponente wird über ein pulsierendes Signal von einer integrierten Oszillatorschaltung geschaltet.
Abgesehen von der obigen Schaltkomponente hat die Schaltung eine Induktivität, eine Diode und einen Kondensator als Hauptbestandteile.
Alle diese Teile sind in der Form angeordnet, die in der folgenden Abbildung zu sehen ist:

Unter Bezugnahme auf das obige Buck-Boost-Diagramm ist der Mosfet der Teil, der die Impulse empfängt, die ihn zwingen, unter zwei Bedingungen zu arbeiten: EIN-Zustand und AUS-Zustand.
Während des EIN-Zustands erhält der Eingangsstrom einen freien Weg durch den Mosfet und versucht sofort, seinen Weg durch die Induktivität zu finden, da die Diode im umgekehrten vorgespannten Zustand positioniert ist.
Der Induktor versucht aufgrund seiner inhärenten Eigenschaft, die plötzliche Zufuhr von Strom zu begrenzen, und speichert in einer Ausgleichsreaktion eine gewisse Strommenge in ihm.
Sobald der Mosfet ausgeschaltet ist, geht er in den AUS-Zustand über und blockiert den Durchgang des Eingangsstroms.
Wiederum ist der Induktor nicht in der Lage, diese plötzliche Änderung des Stroms von einer gegebenen Größe auf Null zu bewältigen, und um dies zu kompensieren, tritt er seinen gespeicherten Strom über die Diode über den Ausgang der Schaltung zurück.
Dabei wird der Strom auch im Kondensator gespeichert.
Während des nächsten EIN-Zustands des Mosfets wird der Zyklus wie oben wiederholt, jedoch ohne dass Strom von der Induktivität verfügbar ist, entlädt der Kondensator die gespeicherte Energie in den Ausgang, was dazu beiträgt, den Ausgang im optimierten Grad stabil zu halten.
Sie fragen sich vielleicht, welcher Faktor über die BUCK- oder BOOST-Ergebnisse am Ausgang entscheidet? Es ist ganz einfach, es hängt davon ab, wie lange der Mosfet im EIN- oder AUS-Zustand bleiben darf.
Mit zunehmender Einschaltzeit der Mosfets wird die Schaltung in einen Aufwärtswandler umgewandelt, während die Ausschaltzeit der Mosfets, die ihre Einschaltzeit überschreitet, dazu führt, dass sich die Schaltung wie ein Buck-Wandler verhält.
Somit kann die Eingabe in den Mosfet über eine optimierte PWM-Schaltung erfolgen, um die erforderlichen Übergänge über dieselbe Schaltung zu erhalten.
Technischere Untersuchung der Buck / Boost-Topologie in SMPS-Schaltkreisen:
Wie im obigen Abschnitt erläutert, sind die drei grundlegenden Topologien, die üblicherweise bei Schaltnetzteilen verwendet werden, die Buck-, Boost- und Buck-Boosts.
Diese sind grundsätzlich nicht isoliert, wobei die Eingangsleistungsstufe eine gemeinsame Basis mit dem Ausgangsleistungsabschnitt teilt. Natürlich konnten wir auch isolierte Versionen finden, obwohl dies ziemlich selten ist.
Die oben ausgedrückten drei Topologien können in Abhängigkeit von ihren ausschließlichen Eigenschaften eindeutig unterschieden werden. Die Eigenschaften können als stationäre Spannungsumwandlungsverhältnisse, die Art der Eingangs- und Ausgangsströme und der Charakter der Ausgangsspannungswelligkeit identifiziert werden.
Zusätzlich kann der Frequenzgang des Arbeitszyklus auf die Ausführung der Ausgangsspannung als eine der wichtigen Eigenschaften angesehen werden.
Unter den oben genannten drei Topologien ist die Buck-Boost-Topologie die am meisten bevorzugte, da sie es dem Ausgang ermöglicht, Spannungen zu arbeiten, die unter der Eingangsspannung liegen (Buck-Modus) und auch Spannungen über der Eingangsspannung zu erzeugen (Boost-Modus).
Die Ausgangsspannung kann jedoch immer mit der entgegengesetzten Polarität vom Eingang erfasst werden, was keinerlei Probleme verursacht.
Der an einen Tiefsetzsteller angelegte Eingangsstrom ist die Form eines pulsierenden Stroms aufgrund des Schaltens des zugehörigen Leistungsschalters (Q1).
Hier schaltet der Strom während jedes Impulszyklus von Null auf 1 um. Gleiches gilt auch für den Ausgang, und wir erhalten einen pulsierenden Strom aufgrund der zugehörigen Diode, die nur in eine Richtung leitet und während des Schaltzyklus eine pulsierende EIN- und AUS-Situation verursacht .
Der Kondensator ist für die Bereitstellung des Kompensationsstroms verantwortlich, wenn sich die Diode während der Schaltzyklen im ausgeschalteten oder in Sperrrichtung vorgespannten Zustand befindet.
In diesem Artikel wird die stationäre Funktionalität des Buck-Boost-Wandlers im Dauerbetrieb und im diskontinuierlichen Betrieb mit beispielhaften Wellenformen erläutert.
Die Funktion des Spannungsaustauschs zwischen Tastverhältnis und Ausgang wird nach einer Einführung in das PWM-Schalterdesign vorgestellt.
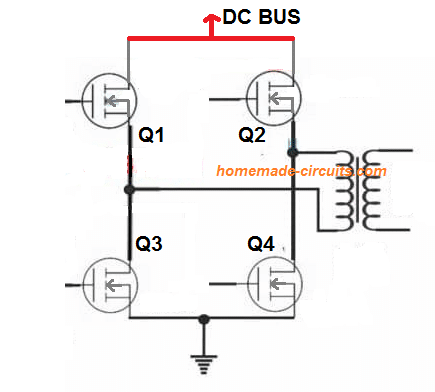
Fig. 1 ein vereinfachtes Schema der Buck-Boost-Leistungsstufe mit einem hinzugefügten Ansteuerschaltungsblock. Der Leistungsschalter Q1 ist ein n-Kanal-MOSFET. Die Ausgangsdiode ist CR1.
Die Induktivität L und der Kondensator C bilden die effiziente Ausgangsfilterung. Der Kondensator ESR, RC (äquivalenter Serienwiderstand) und der Induktor-Gleichstromwiderstand RL werden alle in der analysiert. Der Widerstand R entspricht der Last, die durch den Leistungsstufenausgang identifiziert wird.

Im Rahmen der regulären Funktionalität der Buck-Boost-Leistungsstufe wird Q1 ständig ein- und ausgeschaltet, wobei die Ein- und Ausschaltzeiten vom Steuerkreis gesteuert werden.
Dieses Schaltverhalten ermöglicht eine Kette von Impulsen an der Verbindungsstelle von Q1, CR1 und L.
Obwohl die Induktivität L mit dem Ausgangskondensator C verbunden ist, wird ein erfolgreiches L / C-Ausgangsfilter hergestellt, wenn nur CR1 leitet. Es reinigt die Folge von Impulsen, um eine DC-Ausgangsspannung zu erhalten.
Buck-Boost-Stadium-Steady-State-Analyse
Eine Leistungsstufe kann bei kontinuierlicher oder diskontinuierlicher Einstellung des Induktivitätsstroms funktionieren. Der kontinuierliche Induktorstrommodus wird durch den kontinuierlichen Strom in der Induktivität über die Schaltsequenz im stationären Prozess identifiziert.
Der diskontinuierliche Induktorstrommodus wird dadurch identifiziert, dass der Induktorstrom für einen Abschnitt des Schaltzyklus Null bleibt. Sie beginnt bei Null, reicht bis zu einem Maximalwert und kehrt bei jedem Schaltmuster auf Null zurück.
Die zwei unterschiedlichen Methoden werden anschließend viel detaillierter erwähnt, und Modellvorschläge für den Induktorwert zur Aufrechterhaltung eines ausgewählten Funktionsmodus als Fähigkeit zur Nennlast werden vorgestellt. Es ist ziemlich günstig, wenn ein Wandler nur über seine vorhergesagten Funktionsumstände in einem einzigen Format vorliegt, da sich der Frequenzgang der Leistungsstufe zwischen den beiden unterschiedlichen Betriebstechniken wesentlich ändert.
Bei dieser Bewertung wird ein n-Kanal-Leistungs-MOSFET verwendet und eine positive Spannung VGS (ON) wird vom Gate zu den Source-Anschlüssen von Q1 von der Steuerschaltung geliefert, um den FET einzuschalten. Der Vorteil der Verwendung eines n-Kanal-FET ist sein niedrigerer RDS (Ein), jedoch ist die Steuerschaltung schwierig, da ein suspendierter Antrieb notwendig wird. Für die identischen Gehäuseabmessungen besitzt ein p-Kanal-FET einen höheren RDS (Ein), erfordert jedoch typischerweise keine schwebende Ansteuerschaltung.
Der Transistor Q1 und die Diode CR1 sind in einem gestrichelten Umriss mit den mit a, p und c gekennzeichneten Anschlüssen dargestellt. Dies wird im Abschnitt zur Modellierung der Buck-Boost-Leistungsstufe ausführlich erläutert.
Buck-Boost-Analyse des kontinuierlichen Leitungsmodus im stationären Zustand
Das Folgende ist eine Beschreibung der Buck-Boost-Arbeit im stationären Betrieb bei kontinuierlicher Leitung. Das Hauptziel dieses Segments wäre es, eine Ableitung der Spannungsumwandlungsbeziehung für die Buck-Boost-Leistungsstufe im kontinuierlichen Leitungsmodus vorzulegen.
Dies ist von Bedeutung, da es angibt, wie die Ausgangsspannung durch Arbeitszyklus und Eingangsspannung bestimmt wird oder im Gegenteil, wie das Tastverhältnis in Abhängigkeit von Eingangsspannung und Ausgangsspannung bestimmt werden könnte.
Steady-State bedeutet, dass die Eingangsspannung, die Ausgangsspannung, der Ausgangslaststrom und das Tastverhältnis konstant sind und nicht variieren. Variable Buchstaben werden normalerweise mit Großbuchstaben versehen, um eine stationäre Größe vorzuschlagen. Im kontinuierlichen Leitungsmodus nimmt der Buck-Boost-Wandler pro Schaltzyklus einige Zustände an.
Der EIN-Zustand ist jedes Mal, wenn Q1 EIN und CR1 AUS ist. Der AUS-Zustand ist jedes Mal, wenn Q1 AUS und CR1 EIN ist. Eine einfache lineare Schaltung könnte jeden der beiden Zustände symbolisieren, in denen die Schalter in der Schaltung im Verlauf jedes Zustands durch ihre Anpassungsschaltung ersetzt werden. Das Schaltbild für jede der beiden Bedingungen ist in Abbildung 2 dargestellt.

Die Periode der EIN-Bedingung ist D × TS = TON, wobei D das von der Ansteuerschaltung festgelegte Tastverhältnis ist, dargestellt in Form eines Verhältnisses der Einschaltperiode des Schalters zur Periode einer einzelnen vollständigen Schaltsequenz Ts.
Die Länge des AUS-Zustands wird als TOFF bezeichnet. Da für den Dauerleitungsmodus nur einige Bedingungen pro Schaltzyklus gefunden werden können, ist TOFF gleich (1 - D) × TS. Die Größe (1 - D) wird gelegentlich als D ’bezeichnet. Diese Perioden werden zusammen mit den Wellenformen in Abbildung 3 dargestellt.

In Abbildung 2 bietet Q1 im Verlauf des EIN-Zustands einen reduzierten Widerstand RDS (ein) von Drain zu Source und zeigt einen geringeren Spannungsabfall von VDS = IL × RDS (ein).
Zusätzlich gibt es einen kleinen Spannungsabfall über dem Gleichstromwiderstand des Induktors, der IL × RL entspricht.
Dadurch wird die Eingangsspannung VI minus Defizite (VDS + IL × RL) über die Induktivität L angelegt. CR1 ist innerhalb dieser Zeit ausgeschaltet, da sie in Sperrrichtung vorgespannt wäre.
Der Induktorstrom IL fließt von der Eingangsversorgung VI über Q1 nach Masse. Im Verlauf des EIN-Zustands ist die an der Induktivität angelegte Spannung konstant und entspricht VI - VDS - IL × RL.
Gemäß der in 2 dargestellten Polaritätsnorm für den Strom IL steigt der Induktorstrom aufgrund der ausgeführten Spannung an. Da die angelegte Spannung grundsätzlich konsistent ist, steigt der Induktorstrom linear an. Diese Erhöhung des Induktorstroms im Verlauf von TON ist in Abbildung 3 dargestellt.
Der Pegel, um den sich der Induktorstrom erhöht, wird im Allgemeinen unter Verwendung einer Form der bekannten Formel bestimmt:

Der Anstieg des Induktorstroms im Verlauf des EIN-Status wird wie folgt dargestellt:

Diese Größe ΔIL (+) wird als Induktivitätswelligkeitsstrom bezeichnet. Beachten Sie außerdem, dass durch dieses Intervall jedes Bit des Ausgangslaststroms vom Ausgangskondensator C eingeht.
In Bezug auf 2 bietet Q1, während es ausgeschaltet ist, eine erhöhte Impedanz von seinem Drain zur Source.
Folglich schaltet der Strom von Q1 auf CR1 um, da der in der Induktivität L fließende Strom nicht sofort eingestellt werden kann. Infolge des reduzierenden Induktivitätsstroms kehrt die Spannung über der Induktivität die Polarität um, bis der Gleichrichter CR1 in Vorwärtsrichtung vorgespannt wird und sich einschaltet.
Die über L angeschlossene Spannung wird zu (VO - Vd - IL × RL), wobei die Größe Vd der Durchlassspannungsabfall von CR1 ist. Der Induktorstrom IL fließt an diesem Punkt von der Anordnung des Ausgangskondensators und des Lastwiderstands über CR1 zur negativen Leitung.
Beachten Sie, dass die Ausrichtung von CR1 und der Stromzirkulationspfad in der Induktivität bedeuten, dass der im Ausgangskondensator und in der Lastwiderstandsgruppierung fließende Strom dazu führt, dass VO eine Minusspannung ist. Im Verlauf des AUS-Zustands ist die über den Induktor angeschlossene Spannung stabil und entspricht (VO - Vd - IL × RL).
Unter Beibehaltung unserer ebenfalls Polaritätskonvention ist diese angeschlossene Spannung aufgrund der Tatsache, dass die Ausgangsspannung VO negativ ist, minus (oder umgekehrt polarisiert gegenüber der angeschlossenen Spannung im Verlauf der Einschaltzeit).
Daher nimmt der Induktorstrom während der AUS-Zeit ab. Da die angeschlossene Spannung im Wesentlichen konstant ist, verringert sich der Induktorstrom linear. Diese Verringerung des Induktivitätsstroms im Verlauf von TOFF ist in Abbildung 3 dargestellt.
Die Reduzierung des Induktorstroms durch die AUS-Situation wird bereitgestellt durch:

Diese Größe ΔIL (-) kann als Induktivitätswelligkeitsstrom bezeichnet werden. In stabilen Zustandssituationen müssen der Stromanstieg ΔIL (+) im Verlauf der EIN-Zeit und die Stromreduzierung durch die AUS-Zeit ΔIL (-) identisch sein.
Andernfalls könnte der Induktorstrom eine Gesamtverstärkung oder -verringerung von Zyklus zu Zyklus bieten, die kein stabiler Zustand wäre.
Somit können diese beiden Gleichungen für VO gleichgesetzt und ausgearbeitet werden, um die kontinuierliche Leitung durch Buck-Boost-Spannungsumschaltzugehörigkeit zu erhalten:
Bestimmung für VO:

Wenn Sie TON + TOFF durch TS ersetzen und D = TON / TS und (1 - D) = TOFF / TS verwenden, lautet die stationäre Gleichung für VO:

Beachten Sie, dass bei der Vereinfachung des oben Gesagten TON + TOFF TS ähnlich sein soll. Dies kann nur für den kontinuierlichen Leitungsmodus echt sein, wie wir in der Bewertung des diskontinuierlichen Leitungsmodus feststellen werden. An dieser Stelle sollte eine wesentliche Prüfung vorgenommen werden:
Das Gleichsetzen der beiden Werte von ΔIL ist genau gleichbedeutend mit dem Ausgleichen der Voltsekunden am Induktor. Die am Induktor verwendeten Voltsekunden sind das Produkt der verwendeten Spannung und der Periode, für die die Spannung angelegt wird.
Dies kann der effektivste Weg sein, nicht identifizierte Größen, beispielsweise VO oder D, in Bezug auf gemeinsame Schaltungsparameter zu schätzen, und dieser Ansatz wird in diesem Artikel häufig verwendet. Die Voltsekundenstabilisierung am Induktor ist eine natürliche Voraussetzung und sollte zumindest zusätzlich als Ohmsches Gesetz wahrgenommen werden.
In den obigen Gleichungen für ΔIL (+) und ΔIL (-) sollte die Ausgangsspannung implizit ohne Wechselstromwelligkeitsspannung während der EIN-Zeit und der AUS-Periode konsistent sein.
Dies ist eine akzeptierte Vereinfachung und bringt einige individuelle Ergebnisse mit sich. Erstens wird angenommen, dass der Ausgangskondensator ausreichend groß ist, damit seine Spannungsumwandlung minimal ist.
Zweitens wird die Spannung des Kondensator-ESR zusätzlich als minimal angesehen. Solche Annahmen sind legitim, da die Wechselstromwelligkeitsspannung definitiv signifikant niedriger ist als der Gleichstromanteil der Ausgangsspannung.
Die obige Spannungsänderung für VO zeigt die Wahrheit, dass VO durch Feinabstimmung des Arbeitszyklus D optimiert werden könnte.
Diese Verbindung nähert sich Null, wenn D nahe Null ankommt, und steigt ohne Ziel an, wenn D sich 1 nähert. Eine typische Vereinfachung ist, dass VDS, Vd und RL klein genug sind, um vernachlässigt zu werden. Wenn Sie VDS, Vd und RL auf Null setzen, vereinfacht sich die obige Formel merklich zu:

Eine weniger komplizierte qualitative Methode zur Darstellung des Schaltungsbetriebs wäre die Betrachtung des Induktors als Energiespeicherteil. Jedes Mal, wenn Q1 eingeschaltet ist, wird Energie über den Induktor gegossen.
Während Q1 ausgeschaltet ist, liefert der Induktor einen Teil seiner Energie an den Ausgangskondensator und die Last zurück. Die Ausgangsspannung wird durch Einstellen der Einschaltzeit von Q1 geregelt. Zum Beispiel wird durch Erhöhen der Einschaltzeit von Q1 die an den Induktor gesendete Leistungsmenge verstärkt.
Im Verlauf der Ausschaltzeit von Q1 wird anschließend zusätzliche Energie an den Ausgang gesendet, wodurch die Ausgangsspannung erhöht wird. Im Gegensatz zur Buck-Leistungsstufe entspricht die typische Größe des Induktorstroms nicht dem Ausgangsstrom.
Um den Induktorstrom dem Ausgangsstrom zuzuordnen, beobachten Sie in den Abbildungen 2 und 3, dass der Induktorstrom dem Ausgang nur im ausgeschalteten Zustand der Leistungsstufe zugeführt wird.
Dieser über eine ganze Schaltsequenz gemittelte Strom ist der gleiche wie der Ausgangsstrom, da der ungefähre Strom im Ausgangskondensator gleich Null sein sollte.
Die Verbindung zwischen dem durchschnittlichen Induktivitätsstrom und dem Ausgangsstrom für die Buck-Boost-Endstufe im kontinuierlichen Modus wird bereitgestellt durch:

Ein weiterer wichtiger Gesichtspunkt ist die Tatsache, dass der typische Induktorstrom proportional zum Ausgangsstrom ist, und da der Induktivitätswelligkeitsstrom ΔIL nicht mit dem Ausgangslaststrom zusammenhängt, folgen die minimalen und höchsten Werte des Induktorstroms genau dem durchschnittlichen Induktorstrom.
Wenn beispielsweise der durchschnittliche Induktorstrom aufgrund einer Laststromreduzierung um 2A abnimmt, verringern sich in diesem Fall der niedrigste und der höchste Wert des Induktorstroms um 2A (unter Berücksichtigung des kontinuierlichen Leitungsmodus).
Die vorstehende Bewertung bezog sich auf die Buck-Boost-Leistungsstufenfunktionalität im kontinuierlichen Induktivitätsstrommodus. Das folgende Segment erklärt die stationäre Funktionalität im diskontinuierlichen Leitungsmodus. Das primäre Ergebnis ist eine Ableitung der Spannungsumwandlungsbeziehung für die Buck-Boost-Leistungsstufe im diskontinuierlichen Leitungsmodus.
Buck-Boost-Bewertung des diskontinuierlichen Leitungsmodus im stationären Zustand
Wir untersuchen an dieser Stelle, was passiert, wenn der Laststrom reduziert wird und der Leitungsmodus von kontinuierlich zu diskontinuierlich wechselt.
Denken Sie daran, dass für den kontinuierlichen Leitungsmodus der durchschnittliche Induktorstrom dem Ausgangsstrom folgt, d. H. Wenn sich der Ausgangsstrom verringert, in diesem Fall auch der durchschnittliche Induktorstrom.
Außerdem verfolgen die niedrigsten und höchsten Spitzen des Induktorstroms den durchschnittlichen Induktorstrom genau. Wenn der Ausgangslaststrom unter den Grundstrompegel gesenkt wird, wäre der Induktorstrom für einen Teil der Schaltsequenz Null.
Dies wäre aus den in 3 dargestellten Wellenformen ersichtlich, da sich der Spitze-Spitze-Pegel des Welligkeitsstroms nicht mit dem Ausgangslaststrom ändern kann.
Wenn in einer Buck-Boost-Leistungsstufe der Induktorstrom versucht, unter Null zu fallen, wird er einfach bei Null angehalten (aufgrund der unidirektionalen Strombewegung in CR1) und dort bis zum Beginn der nachfolgenden Schaltaktion fortgesetzt. Dieser Arbeitsmodus ist als diskontinuierlicher Leitungsmodus bekannt.
Eine Leistungsstufe, die der Buck-Boost-Schaltung im diskontinuierlichen Leitungsformat arbeitet, besitzt drei unterschiedliche Zustände über jeden Schaltzyklus im Gegensatz zu zwei Zuständen für das kontinuierliche Leitungsformat.
Der Induktorstromzustand, in dem sich die Leistungsstufe an der Peripherie zwischen kontinuierlicher und diskontinuierlicher Einstellung befindet, ist in Abbildung 4 dargestellt.
Dabei fällt der Induktivitätsstrom einfach auf Null zusammen, während der folgende Schaltzyklus unmittelbar nach Erreichen des Nullpunkts beginnt. Beachten Sie, dass die Werte von IO und IO (Crit) in Abbildung 4 dargestellt sind, da IO und IL entgegengesetzte Polaritäten enthalten.

Eine weitere Absenkung des Ausgangslaststroms versetzt die Leistungsstufe in ein diskontinuierliches Leitungsmuster. Diese Bedingung ist in Abbildung 5 dargestellt.
Der Frequenzgang der Leistungsstufe im diskontinuierlichen Modus unterscheidet sich ziemlich stark vom Frequenzgang im kontinuierlichen Modus, der im Segment Buck-Boost-Leistungsstufenmodellierung vorgestellt wird. Darüber hinaus ist die Eingabe-Ausgabe-Verbindung ziemlich unterschiedlich, wie auf dieser Seitenableitung dargestellt:

Denken Sie daran, dass Sie drei unterschiedliche Zustände haben, die der Konverter durch die Funktionalität des diskontinuierlichen Leitungsmodus berücksichtigt, um die Ableitung des Spannungsumschaltverhältnisses der Buck-Boost-Leistungsstufe im diskontinuierlichen Leitungsmodus zu starten.
Der EIN-Zustand ist, wenn Q1 EIN und CR1 AUS ist. Der AUS-Zustand ist, wenn Q1 AUS und CR1 EIN ist. Die IDLE-Bedingung ist, wenn jeweils Q1 und CR1 AUS sind. Die ersten beiden Bedingungen sind der Situation im kontinuierlichen Modus sehr ähnlich, und die Schaltungen von Fig. 2 sind abgesehen von dem TOFF ≠ (1 - D) × TS relevant. Der Rest der Schaltsequenz ist der IDLE-Status.
Zusätzlich sollten der Gleichstromwiderstand der Ausgangsinduktivität, der Durchlassspannungsabfall der Ausgangsdiode sowie der Spannungsabfall im eingeschalteten Zustand des Leistungs-MOSFET normalerweise klein genug sein, um übersehen zu werden.
Die Zeitdauer des EIN-Zustands ist TON = D × TS, wobei D das von der Steuerschaltung festgelegte Tastverhältnis ist, das als Verhältnis der Einschaltzeit zur Zeit einer vollständigen Schaltsequenz Ts angegeben ist. Die Länge des AUS-Zustands beträgt TOFF = D2 × TS. Die IDLE-Periode ist der Rest des Schaltmusters, das als TS-TON-TOFF = D3 × TS dargestellt wird. Diese Perioden werden mit den Wellenformen in Abbildung 6 angegeben.
Ohne die umfassende Beschreibung zu überprüfen, werden die Gleichungen für den Anstieg und Abfall des Induktorstroms nachstehend aufgeführt. Der Induktorstromanstieg im Verlauf des EIN-Zustands wird ausgegeben durch:

Die Welligkeitsstromgröße & Dgr; IL (+) ist ebenfalls der Spitzeninduktivitätsstrom Ipk, da im diskontinuierlichen Modus der Strom bei jedem Zyklus bei 0 beginnt. Die Induktorstromreduzierung im Verlauf des AUS-Zustands wird dargestellt durch:

Genau wie in der Situation des kontinuierlichen Leitungsmodus sind der Stromanstieg ΔIL (+) im Verlauf der EIN-Zeit und die Stromreduzierung während der AUS-Zeit ΔIL (-) identisch. Somit könnten diese beiden Gleichungen für VO gleichgesetzt und adressiert werden, um den Anfang von zwei Gleichungen zu erhalten, die zur Lösung des Spannungsumwandlungsverhältnisses verwendet werden sollen:

Als nächstes bestimmen wir den Ausgangsstrom (die Ausgangsspannung VO geteilt durch die Ausgangslast R). Dies ist der Durchschnitt über eine Schaltsequenz des Induktorstroms zu dem Zeitpunkt, zu dem CR1 leitend wird (D2 × TS).

Ersetzen Sie hier die Verbindung für IPK (ΔIL (+)) in die obige Gleichung, um Folgendes zu erhalten:
Daher haben wir zwei Gleichungen, die für den gerade abgeleiteten Ausgangsstrom (VO geteilt durch R) und die für die Ausgangsspannung, beide in Bezug auf VI, D und D2. Wir entwirren an dieser Stelle jede Formel für D2 und fixieren die beiden Gleichungen auf Augenhöhe.
Unter Verwendung der resultierenden Gleichung könnte eine Darstellung für die Ausgangsspannung VO erhalten werden. Die Zugehörigkeit zur diskontinuierlichen Buck-Boost-Spannungsumwandlung im Leitungsmodus wird geschrieben von:

Die obige Verbindung zeigt eine der Hauptunterschiede zwischen den beiden Leitungsmodi. Für den diskontinuierlichen Leitungsmodus ist die Spannungsänderungsbeziehung eine Funktion der Eingangsspannung, des Arbeitszyklus, der Induktivität der Leistungsstufe, der Schaltfrequenz und des Ausgangslastwiderstands.
Für den Dauerleitungsmodus wird die Spannungsumschaltverbindung nur durch die Eingangsspannung und das Tastverhältnis beeinflusst. In herkömmlichen Anwendungen wird die Buck-Boost-Leistungsstufe in einer Wahl zwischen einem kontinuierlichen Leitungsmodus oder einem diskontinuierlichen Leitungsmodus betrieben. Für eine bestimmte Verwendung wird ein Leitungsmodus ausgewählt, während die Leistungsstufe so hergestellt wurde, dass der identische Modus aufrechterhalten wird.
Zurück: PIC-Tutorial - Von Registern zu Interrupts Weiter: IC 555 Automatischer Notlichtkreis