Auswählen der richtige Motor für verschiedene Anwendungen hängt von einigen Konstruktionskriterien ab, wie z. B. Anforderungen an die Positionsgenauigkeit, Kosten, Verfügbarkeit der Antriebsleistung, Drehmoment und Beschleunigungsanforderungen. Insgesamt eignen sich Motoren wie Gleichstrom-, Servo- und Schrittmotoren am besten für verschiedene Anwendungen. Der Schrittmotor eignet sich jedoch gut für Anwendungen mit hohem Haltemoment und geringerer Beschleunigung. Viele haben das Missverständnis, dass es einen großen Unterschied zwischen Gleichstrommotor, Servomotor und Schrittmotor gibt. Um die Unterschiede zwischen diesen drei Motoren zu kennen, gibt dieser Artikel einen kurzen Unterschied zwischen diesen drei Motoren.
Unterschied zwischen einem Gleichstrommotor, einem Servomotor und einem Schrittmotor
Die Auswahl zwischen einem Gleichstrommotor, einem Servomotor und einem Schrittmotor kann eine ziemliche Aufgabe sein, einschließlich des Ausgleichs zahlreicher Konstruktionsfaktoren, nämlich Kosten, Geschwindigkeit, Drehmoment, Beschleunigung und auch Antriebsschaltungen, die alle eine wesentliche Rolle bei der Auswahl der besten spielen Elektromotor für Ihre Anwendung.
Gleichstrommotoren
Der Gleichstrommotor ist ein Zweidraht-Motor mit kontinuierlicher Rotation und die beiden Drähte sind Strom und Masse. Wenn die Versorgung angelegt ist, beginnt sich ein Gleichstrommotor zu drehen, bis diese Stromversorgung unterbrochen wird. Die meisten Gleichstrommotoren laufen mit hohen Umdrehungen pro Minute (U / min). Beispiele sind Lüfter, die in Computern zum Kühlen verwendet werden, oder von einem Radio gesteuerte Autoräder.

Gleichspannungs Motor
Die Drehzahl des Gleichstrommotors kann mithilfe der PWM-Technik (Pulsweitenmodulation) gesteuert werden, bei der die Leistung schnell ein- und ausgeschaltet wird. Der Prozentsatz der Zeit, die für das Ein- / Ausschalten benötigt wird, definiert die Motordrehzahl. Zum Beispiel Wenn die Leistung mit 50% betrieben wird, dreht sich der Gleichstrommotor mit der halben Drehzahl von 100%. Jeder Impuls ist so schnell, dass sich der Motor ohne Unterbrechung zu drehen scheint! Weitere Informationen finden Sie unter dem Link Gleichstrommotor funktioniert, Vor- und Nachteile
Servomotor
Im Allgemeinen ist der Servomotor eine Verbindung von vier Dingen, nämlich einem Gleichstrommotor, einem Steuerkreis, einem Getriebesatz und auch einem Potentiometer, üblicherweise einem Positionssensor.
Die Position des Servomotors kann genauer gesteuert werden als die von typischen Gleichstrommotoren, und im Allgemeinen haben sie drei Drähte wie Leistung, GND und Steuerung. Diese Motoren werden ständig mit Strom versorgt, wobei der Steuerkreis des Servomotors den Stromverbrauch ändert, um den Servomotor anzutreiben. Diese Motoren sind für genauere Aufgaben konzipiert, bei denen eine Motorposition genau wie das Bewegen eines Roboterarms oder das Steuern des Ruders auf einem Boot oder einem Roboterbein innerhalb eines bestimmten Bereichs klar sein muss.

Servomotor
Diese Motoren wechseln sich nicht so leicht ab wie ein Standard-Gleichstrommotor. An seiner Stelle beträgt der Drehwinkel teilweise 1800. Servomotoren erhalten ein Steuersignal, das eine O / P-Position anzeigt und den Gleichstrommotor mit Strom versorgt, bis die Welle in die vom Positionssensor festgelegte genaue Position geht.
PWM (Pulsweitenmodulation) dient zur Steuerung des Signals eines Servomotors. Im Gegensatz zu Gleichstrommotoren ist es jedoch die Periode des positiven Impulses, die die Position der Servowelle etwas über die Drehzahl hinaus steuert. Der Wert des Neutralimpulses hängt vom Servo ab, das die Welle des Servomotors in der mittleren Position hält. Durch Erhöhen des Impulswerts dreht sich der Servomotor im Uhrzeigersinn, und ein kürzerer Impuls schaltet die Welle gegen den Uhrzeigersinn.
Der Servosteuerungsimpuls wiederholt sich normalerweise alle 20 ms und teilt dem Servomotor grundsätzlich mit, wohin er gehen soll, selbst wenn dies bedeutet, in der ähnlichen Position zu bleiben. Wenn einem Servo befohlen wird, sich zu bewegen, bewegt es sich in die Position und hält diese Position, selbst wenn die externe Kraft gegen sie drückt. Der Servomotor kämpft gegen das Verlassen dieser Position. Die maximale Widerstandskraft, die der Servomotor verwenden kann, ist das Drehmoment dieses Servos. Weitere Informationen finden Sie unter dem Link Servomotor funktioniert, Vor- und Nachteile
Schrittmotoren
Ein Schrittmotor ist grundsätzlich ein Servomotor, der eine andere Motorisierungsmethode verwendet. Wenn ein Motor einen Gleichstrommotor mit kontinuierlicher Rotation und eine kombinierte Steuerschaltung enthält, verwenden Schrittmotoren mehrere gekerbte Elektromagnete, die um ein zentrales Gerät angeordnet sind, um die Position zu beschreiben.
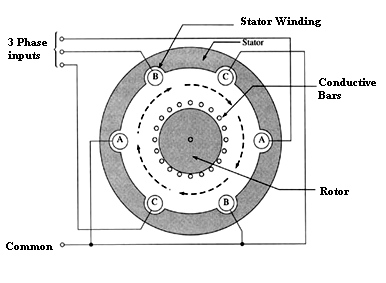
Der Schrittmotor benötigt einen äußeren Steuerkreis, um jeden Elektromagneten separat zu aktivieren und die Motorwelle einzuschalten. Wenn der Elektromagnet mit Strom betrieben wird, zieht er die Zähne des Geräts an und stützt sie, etwas versetzt zum nächsten Elektromagneten „B“. Wenn 'A' ausgeschaltet und 'B' eingeschaltet ist, dreht sich das Gerät leicht, um sich mit 'B' und überall im Kreis auszurichten, wobei jeder Elektromagnet um das Gerät nacheinander aktiviert und deaktiviert wird, um eine Drehung durchzuführen. Jede Umdrehung von einem Elektromagneten zum nächsten wird als 'Schritt' bezeichnet, und daher kann der Motor durch genau vordefinierte Schrittwinkel über eine volle Umdrehung von 3600 aktiviert werden.

Schrittmotor
Diese Motoren werden in zwei Varianten verwendet, nämlich unipolar / bipolar. Bipolare Motoren sind die stabilsten Motortypen und haben im Allgemeinen 4 oder 8 Leitungen. Sie haben zwei Anordnungen von elektromagnetischen Spulen im Inneren, und das Treten wird durch Ändern der Stromrichtung in den Spulen erreicht. Unipolare Motoren sind erkennbar daran, dass sie 5 Drähte, 6 Drähte oder sogar 8 Drähte haben, ebenfalls 2 Spulen haben, aber jeder hat einen Mittelabgriff. Diese Motoren können schrittweise laufen, ohne dass die Stromrichtung in den Spulen entgegengesetzt sein muss, was die Elektronik einfacher macht. Da dieser Abgriff jedoch verwendet wird, um nur die Hälfte jeder Spule gleichzeitig zu verstärken, haben sie normalerweise ein geringeres Drehmoment als bipolar.
Die Schrittmotorkonstruktion kann ohne die Notwendigkeit des aktivierten Motors ein konstantes Haltemoment liefern, vorausgesetzt, der Motor wird innerhalb seiner Grenzen verwendet, es treten keine Platzierungsfehler auf, da diese Motoren körperlich vordefinierte Situationen haben. Bitte beachten Sie den Link unter weiß mehr über Schrittmotor arbeiten, Vor- und Nachteile
Vor- und Nachteile von Gleichstrom-, Servo- und Schrittmotoren
Die Vor- und Nachteile von Gleichstrommotor, Servomotor und Schrittmotor umfassen Folgendes.
- Gleichstrommotoren sind Motoren mit schneller und kontinuierlicher Rotation, die hauptsächlich für alles verwendet werden, was mit einer hohen Rotation pro Minute (U / min) rotieren muss. Zum Beispiel Autoräder, Lüfter usw.
- Servomotoren bieten ein hohes Drehmoment, eine schnelle und genaue Drehung in einem begrenzten Winkel. Im Allgemeinen eine leistungsstarke Alternative zu Schrittmotoren, jedoch komplizierterer Aufbau mit PWM-Tuning. Geeignet für Roboterarme / Beine oder Rudersteuerung usw.
- Schrittmotoren sind langsam, einfach einzurichten, präzise zu drehen und zu steuern - Vorteil gegenüber anderen Motoren wie Servomotoren bei der Steuerung einer Position. Wenn diese Motoren einen Rückkopplungsmechanismus und eine Rückstellschaltung benötigen, um die Ortung des Antriebs anzutreiben, hat dieser Motor eine Positionssteuerung durch seine Art der Drehung durch fraktionierte Additionen. Geeignet für 3D-Drucker und verwandte Geräte, bei denen die Position entscheidend ist.
Hier geht es also um den Hauptunterschied zwischen einem Gleichstrommotor, einem Servomotor und einem Schrittmotor mit Vor- und Nachteilen. Wir hoffen, dass Sie dieses Konzept besser verstehen. Wenn Sie Zweifel an diesem Konzept haben oder elektrische Projekte mit Motoren durchführen möchten, geben Sie bitte Ihr wertvolles Feedback, indem Sie dies im Kommentarbereich unten kommentieren. Hier ist eine Frage an Sie, Was ist die Funktion eines Motors?