In diesem Beitrag diskutieren wir die Herstellung einer einfachen Drehzahlreglerschaltung für einen 3-Phasen-Induktionsmotor, die auch für einen einphasigen Induktionsmotor oder buchstäblich für jeden Typ von Wechselstrommotor angewendet werden kann.
Wenn es darum geht Steuerung der Drehzahl von Induktionsmotoren Normalerweise werden Matrixkonverter verwendet, die viele komplexe Stufen wie LC-Filter, bidirektionale Arrays von Schaltern (unter Verwendung von IGBTs) usw. umfassen.
All dies wird verwendet, um letztendlich ein zerhacktes Wechselstromsignal zu erzielen, dessen Tastverhältnis unter Verwendung einer komplexen Mikrocontrollerschaltung eingestellt werden könnte, um schließlich die erforderliche Motordrehzahlregelung bereitzustellen.
Wir können jedoch experimentieren und versuchen, eine dreiphasige Drehzahlregelung des Induktionsmotors durch ein viel einfacheres Konzept zu erreichen, indem wir die fortschrittlichen Optokoppler-ICs des Nulldurchgangsdetektors, einen Leistungstriac und eine PWM-Schaltung verwenden.
Verwenden des Optokopplers mit Nulldurchgangsdetektor
Dank der MOC-Serie von Optokopplern, die Triac-Steuerkreise extrem sicher und einfach zu konfigurieren gemacht haben und eine problemlose PWM-Integration für die vorgesehenen Steuerungen ermöglichen.
In einem meiner früheren Beiträge habe ich eine einfache besprochen PWM-Softstart-Motorsteuerkreis das den MOC3063 IC implementiert hat, um einen effektiven Sanftanlauf am angeschlossenen Motor bereitzustellen.
Auch hier verwenden wir eine identische Methode zur Durchsetzung der vorgeschlagenen Drehzahlreglerschaltung für 3-Phasen-Induktionsmotoren. Das folgende Bild zeigt, wie dies getan werden kann:
In der Abbildung sehen wir drei identische MOC-Optokopplerstufen, die in ihrem Standard-Triac-Reglermodus konfiguriert sind, und die Eingangsseite ist in a integriert einfache IC 555 PWM-Schaltung .
Die 3 MOC-Schaltkreise sind für die Handhabung des 3-Phasen-Wechselstromeingangs und die Lieferung desselben an den angeschlossenen Induktionsmotor konfiguriert.
Der PWM-Eingang an der isolierten LED-Steuerseite des Optos bestimmt das Zerhackungsverhältnis des 3-Phasen-Wechselstromeingangs, der vom MOC-ICS verarbeitet wird.
Verwendung des IC 555 PWM-Controllers (Zero Voltage Switching)
Das bedeutet, durch Anpassen der PWM-Poti für den 555 IC man kann die Drehzahl des Induktionsmotors effektiv steuern.
Der Ausgang an Pin 3 hat einen variierenden Arbeitszyklus, der wiederum die Ausgangstriacs entsprechend schaltet, was entweder zu einer Erhöhung des AC-RMS-Werts oder zu einer Verringerung desselben führt.
Das Erhöhen des Effektivwerts durch breitere PWMs ermöglicht das Erreichen einer höheren Drehzahl am Motor, während das Verringern des AC-Effektivwerts durch engere PWMs einen gegenteiligen Effekt erzeugt, dh, dass der Motor proportional langsamer wird.
Die oben genannten Funktionen werden mit viel Präzision und Sicherheit implementiert, da den ICs viele interne hochentwickelte Funktionen zugewiesen sind, die speziell für sie vorgesehen sind Fahren von Triacs und schweren induktiven Lasten wie Induktionsmotoren, Magnete, Ventile, Schütze, Halbleiterrelais usw.
Der IC sorgt auch für einen perfekt isolierten Betrieb der Gleichstromstufe, sodass der Benutzer die Einstellungen ohne Angst vor einem elektrischen Schlag vornehmen kann.
Das Prinzip kann auch effizient zur Steuerung der einphasigen Motordrehzahl verwendet werden, indem ein einzelner MOC-IC anstelle von 3 verwendet wird.
Das Design basiert eigentlich auf zeitproportionaler Triac-Antrieb Theorie. Die obere PWM-Schaltung des IC555 kann eingestellt werden, um ein Tastverhältnis von 50% bei einer viel höheren Frequenz zu erzeugen, während die untere PWM-Schaltung zum Implementieren des Drehzahlregelungsvorgangs des Induktionsmotors durch die Einstellungen des zugehörigen Topfes verwendet werden kann.
Es wird empfohlen, dass dieser 555-IC eine relativ niedrigere Frequenz als die obere IC 555-Schaltung hat. Dies kann durch Erhöhen des Kondensators Pin 6/2 auf etwa 100 nF erfolgen.

HINWEIS: DAS HINZUFÜGEN VON GEEIGNETEN INDUKTOREN IN DER REIHE MIT DEN PHASENDRAHTEN KANN DIE GESCHWINDIGKEITSREGELUNGSLEISTUNG DES SYSTEMS DRASTISCH VERBESSERN.
Angenommene Wellenform- und Phasensteuerung unter Verwendung des obigen Konzepts:

Das oben erläuterte Verfahren zur Steuerung eines 3-Phasen-Induktionsmotors ist tatsächlich ziemlich grob, da dies der Fall ist keine V / Hz-Steuerung .
Es wird einfach das Ein- und Ausschalten des Netzes mit unterschiedlichen Raten verwendet, um eine durchschnittliche Leistung für den Motor zu erzeugen und die Drehzahl zu steuern, indem dieser durchschnittliche Wechselstrom für den Motor geändert wird.
Stellen Sie sich vor, Sie schalten den Motor 40 Mal oder 50 Mal pro Minute manuell ein / aus. Dies würde dazu führen, dass Ihr Motor auf einen relativen Durchschnittswert verlangsamt und sich dennoch kontinuierlich bewegt. Das obige Prinzip funktioniert auf die gleiche Weise.
Ein technischerer Ansatz besteht darin, eine Schaltung zu entwerfen, die eine ordnungsgemäße Steuerung des V / Hz-Verhältnisses gewährleistet und diese abhängig von der Geschwindigkeit des Schlupfes oder etwaigen Spannungsschwankungen automatisch anpasst.
Hierfür setzen wir grundsätzlich folgende Stufen ein:
- H-Bridge- oder Full Bridge-IGBT-Treiberschaltung
- 3-Phasen-Generatorstufe zur Speisung des Vollbrückenstromkreises
- V / Hz PWM-Prozessor
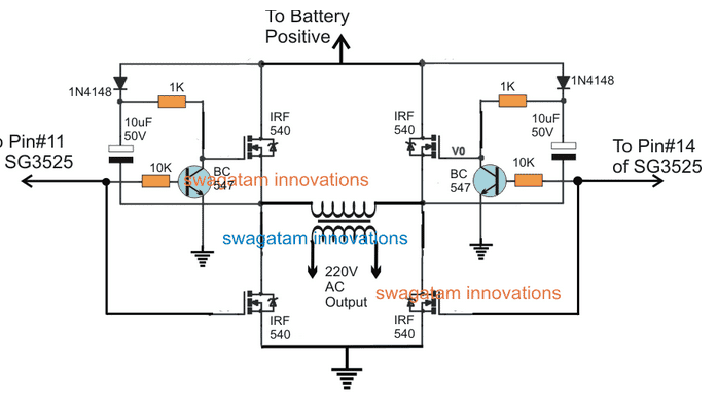
Verwenden einer Vollbrücken-IGBT-Steuerschaltung
Wenn Ihnen die Einrichtungsverfahren des oben genannten Triac-basierten Designs entmutigend erscheinen, können Sie die folgende PWM-basierte Vollbrücken-Induktionsmotordrehzahlregelung ausprobieren:

Die in der obigen Abbildung gezeigte Schaltung verwendet einen Einzelchip-Vollbrückentreiber IC IRS2330 (neueste Version ist 6EDL04I06NT), die alle Funktionen eingebaut hat, um einen sicheren und perfekten 3-Phasen-Motorbetrieb zu gewährleisten.
Der IC benötigt nur einen synchronisierten 3-Phasen-Logikeingang über seine HIN / LIN-Pinbelegung, um den erforderlichen 3-Phasen-Oszillationsausgang zu erzeugen, der schließlich zum Betrieb des Vollbrücken-IGBT-Netzwerks und des angeschlossenen 3-Phasen-Motors verwendet wird.
Das PWM-Einspritzung mit Drehzahlregelung wird durch 3 separate Halbbrücken-NPN / PNP-Treiberstufen implementiert, die mit einer SPWM-Einspeisung von einem IC 555-PWM-Generator gesteuert werden, wie in unseren vorherigen Entwürfen gezeigt. Dieser PWM-Pegel kann letztendlich zur Steuerung der Drehzahl des Induktionsmotors verwendet werden.
Bevor wir die eigentliche Drehzahlregelungsmethode für den Induktionsmotor kennenlernen, wollen wir zunächst verstehen, wie die Automatik funktioniert V / Hz-Steuerung kann unter Verwendung einiger IC 555-Schaltungen erreicht werden, wie nachstehend erörtert wird
Der automatische V / Hz-PWM-Prozessorkreis (Closed Loop)
In den obigen Abschnitten haben wir die Konstruktionen kennengelernt, die dem Induktionsmotor helfen, sich mit der vom Hersteller angegebenen Geschwindigkeit zu bewegen. Er passt sich jedoch nicht an ein konstantes V / Hz-Verhältnis an, es sei denn, der folgende PWM-Prozessor ist in den H integriert -Bridge PWM-Eingangseinspeisung.

Die obige Schaltung ist einfach PWM-Generator mit ein paar IC 555 . Der IC1 erzeugt die PWM-Frequenz, die mit Hilfe von R4 / C3 an Pin 6 von IC2 in Dreieckswellen umgewandelt wird.
Diese Dreieckswellen werden mit der Sinuswellenwelligkeit an Pin 5 von IC2 verglichen. Diese Probenwelligkeiten werden durch Gleichrichten des 3-Phasen-Wechselstromnetzes in eine 12-V-Wechselstromwelligkeit erfasst und für die erforderliche Verarbeitung an Pin 5 des IC2 weitergeleitet.
Durch Vergleichen der beiden Wellenformen wird eine entsprechend dimensionierte SPWM wird generiert an Pin 3 von IC2, der zur Treiber-PWM für das H-Brückennetzwerk wird.
Wie die V / Hz-Schaltung funktioniert
Wenn die Stromversorgung eingeschaltet wird, beginnt der Kondensator an Pin 5 damit, an Pin 5 eine Spannung von Null zu erzeugen, die den niedrigsten SPWM-Wert für den bewirkt H-Brückenschaltung Dies wiederum ermöglicht es dem Induktionsmotor, mit einem langsamen, allmählichen Sanftanlauf zu starten.
Wenn sich dieser Kondensator auflädt, steigt das Potential an Pin 5 an, wodurch das SPWM proportional erhöht wird und der Motor allmählich an Drehzahl gewinnen kann.
Wir können auch eine Drehzahlmesser-Rückkopplungsschaltung sehen, die ebenfalls in Pin 5 des IC2 integriert ist.
Dies Geschwindigkeitsmesser überwacht die Rotordrehzahl oder die Schlupfdrehzahl und erzeugt zusätzliche Spannung an Pin 5 von IC2.
Wenn nun die Motordrehzahl zunimmt, versucht die Schlupfgeschwindigkeit, sich mit der Statorfrequenz zu synchronisieren, und beginnt dabei, an Geschwindigkeit zu gewinnen.
Diese Erhöhung des Induktionsschlupfes erhöht die Drehzahlmesserspannung proportional, was wiederum bewirkt, dass IC2 die Spannung erhöht SPWM-Ausgabe und dies wiederum erhöht die Motordrehzahl weiter.
Die obige Einstellung versucht, das V / Hz-Verhältnis auf einem ziemlich konstanten Niveau zu halten, bis schließlich das SPWM von IC2 nicht weiter ansteigen kann.
Zu diesem Zeitpunkt nehmen die Schlupfgeschwindigkeit und die Statorgeschwindigkeit einen stationären Zustand an und dies wird beibehalten, bis die Eingangsspannung oder die Schlupfgeschwindigkeit (aufgrund der Last) nicht geändert werden. Falls diese geändert werden, wird die V / Hz-Prozessorschaltung wieder aktiviert und beginnt, das Verhältnis anzupassen, um das optimale Ansprechverhalten der Induktionsmotordrehzahl aufrechtzuerhalten.
Der Drehzahlmesser
Das Drehzahlmesserschaltung kann auch billig unter Verwendung der folgenden einfachen Schaltung gebaut und in die oben erläuterten Schaltungsstufen integriert werden:

So implementieren Sie die Geschwindigkeitsregelung
In den obigen Abschnitten haben wir den automatischen Regelungsprozess verstanden, der durch die Integration von a erreicht werden kann Drehzahlmesser-Feedback zu einer automatisch regulierenden SPWM-Steuerschaltung.
Lassen Sie uns nun lernen, wie die Drehzahl eines Induktionsmotors durch Variieren der Frequenz gesteuert werden kann, wodurch das SPWM letztendlich gezwungen wird, abzufallen und das richtige V / Hz-Verhältnis beizubehalten.
Das folgende Diagramm erläutert die Geschwindigkeitsregelungsstufe:

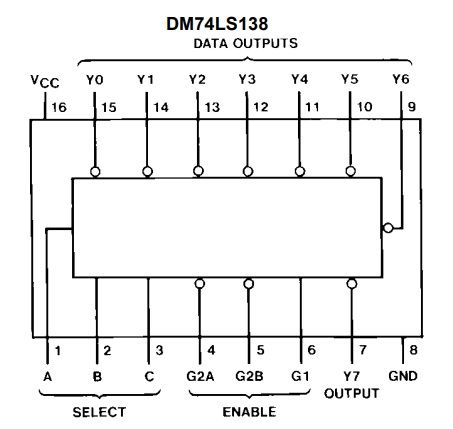
Hier sehen wir eine 3-Phasen-Generatorschaltung unter Verwendung des IC 4035, deren Phasenverschiebungsfrequenz durch Variieren des Takteingangs an Pin 6 variiert werden kann.
Die 3-Phasen-Signale werden über die 4049-IC-Gatter angelegt, um die erforderlichen HIN, LIN-Einspeisungen für das Vollbrückentreibernetzwerk zu erzeugen.
Dies impliziert, dass wir durch geeignetes Variieren der Taktfrequenz des IC 4035 die 3-Phasen-Betriebsfrequenz des Induktionsmotors effektiv ändern können.
Dies wird durch eine einfache IC 555-Astable-Schaltung implementiert, die eine einstellbare Frequenz an Pin 6 des IC 4035 speist und die Einstellung der Frequenz über den angeschlossenen 100K-Poti ermöglicht. Der Kondensator C muss so berechnet werden, dass der einstellbare Frequenzbereich innerhalb der korrekten Spezifikation des angeschlossenen Induktionsmotors liegt.
Wenn der Frequenztopf variiert wird, ändert sich auch die effektive Frequenz des Induktionsmotors, wodurch sich die Drehzahl des Motors entsprechend ändert.
Wenn beispielsweise die Frequenz verringert wird, verringert sich die Motordrehzahl, was wiederum dazu führt, dass der Drehzahlmesserausgang die Spannung proportional verringert.
Diese proportionale Verringerung der Drehzahlmesserleistung zwingt das SPWM, sich zu verengen, und zieht dadurch die an den Motor abgegebene Spannung proportional herunter.
Diese Aktion stellt wiederum sicher, dass das V / Hz-Verhältnis beibehalten wird, während die Drehzahl des Induktionsmotors durch Frequenzsteuerung gesteuert wird.
Warnung: Das obige Konzept basiert nur auf theoretischen Annahmen. Bitte fahren Sie mit Vorsicht fort.
Wenn Sie weitere Zweifel an diesem 3-Phasen-Induktionsmotor-Drehzahlregler haben, können Sie dies gerne in Ihren Kommentaren veröffentlichen.
Zurück: So entwerfen Sie eine unterbrechungsfreie Stromversorgung (USV) Weiter: Ein- und Ausschalten von zwei alternativen Lasten mit IC 555